




Development Status of PCV Leakage Investigation Devices (Toshiba)
(May 16, 2014)
On May 16, 2014, members of the Fuel Debris Retrieval Technologies Subcommittee and other representatives of the IRID Technical Advisory Committee visited IHI Corporation’s Yokohama Engineering Center to observe the status of development of devices used to investigate Primary Containment Vessel (PCV) leakage.
The subcommittee members observed devices being developed by IHI at their Yokohama Engineering Center at Isogo in collaboration with Toshiba, a member of IRID.
There were four devices in total that they looked at:
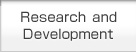
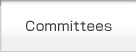
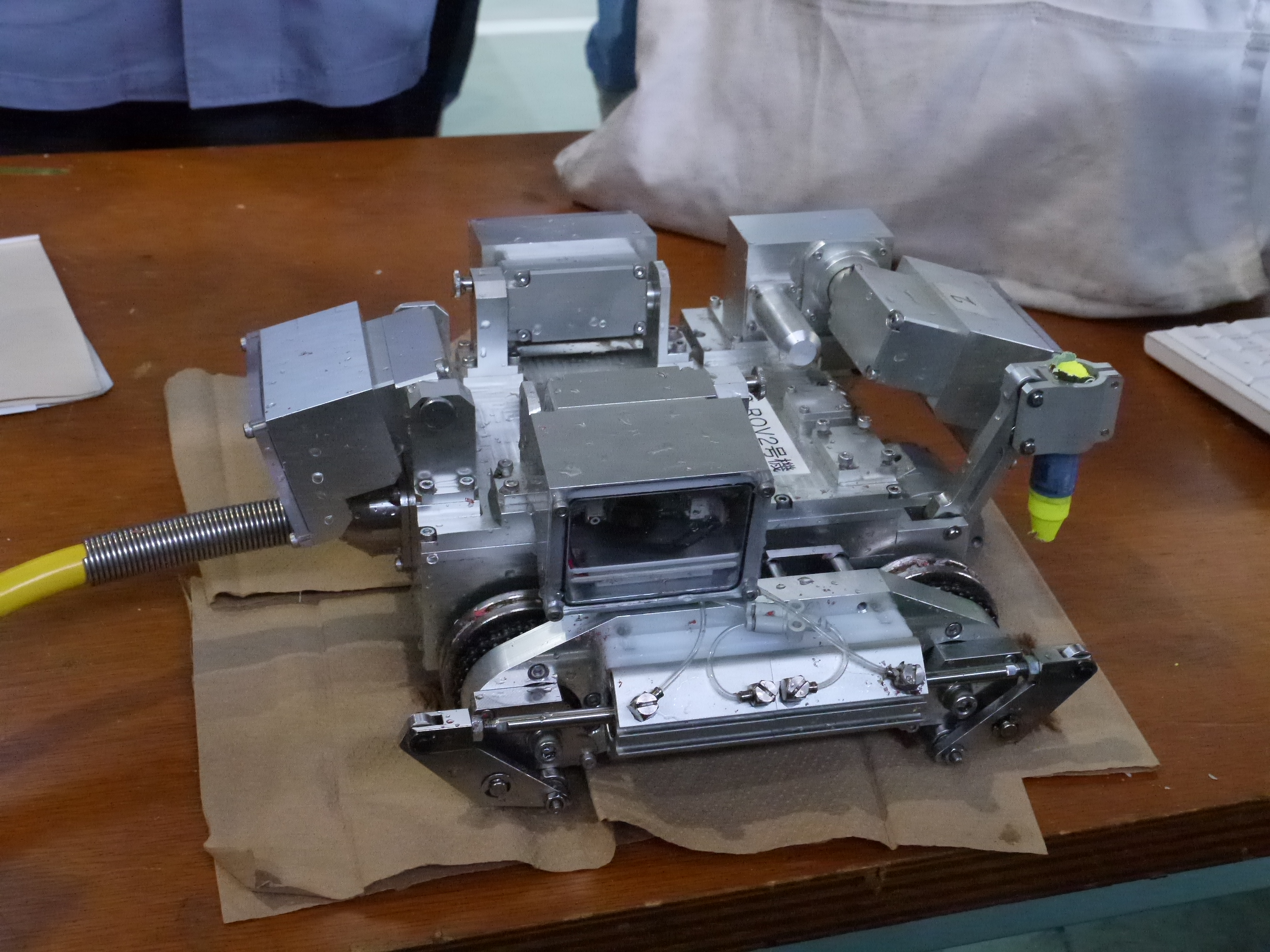
1. Investigation device of the outer lower surface of Suppression Chamber (S/C) (SC-ROV)
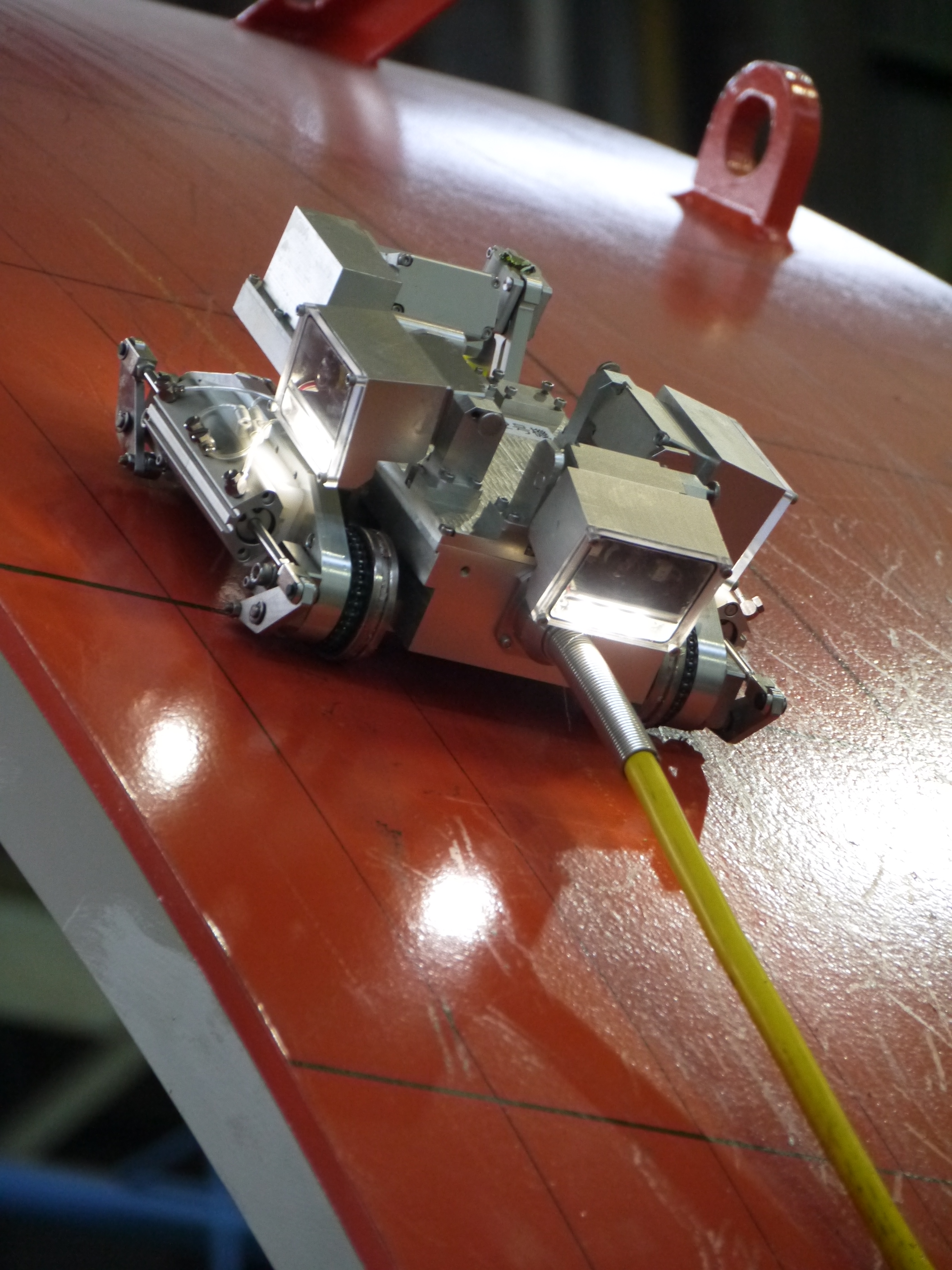
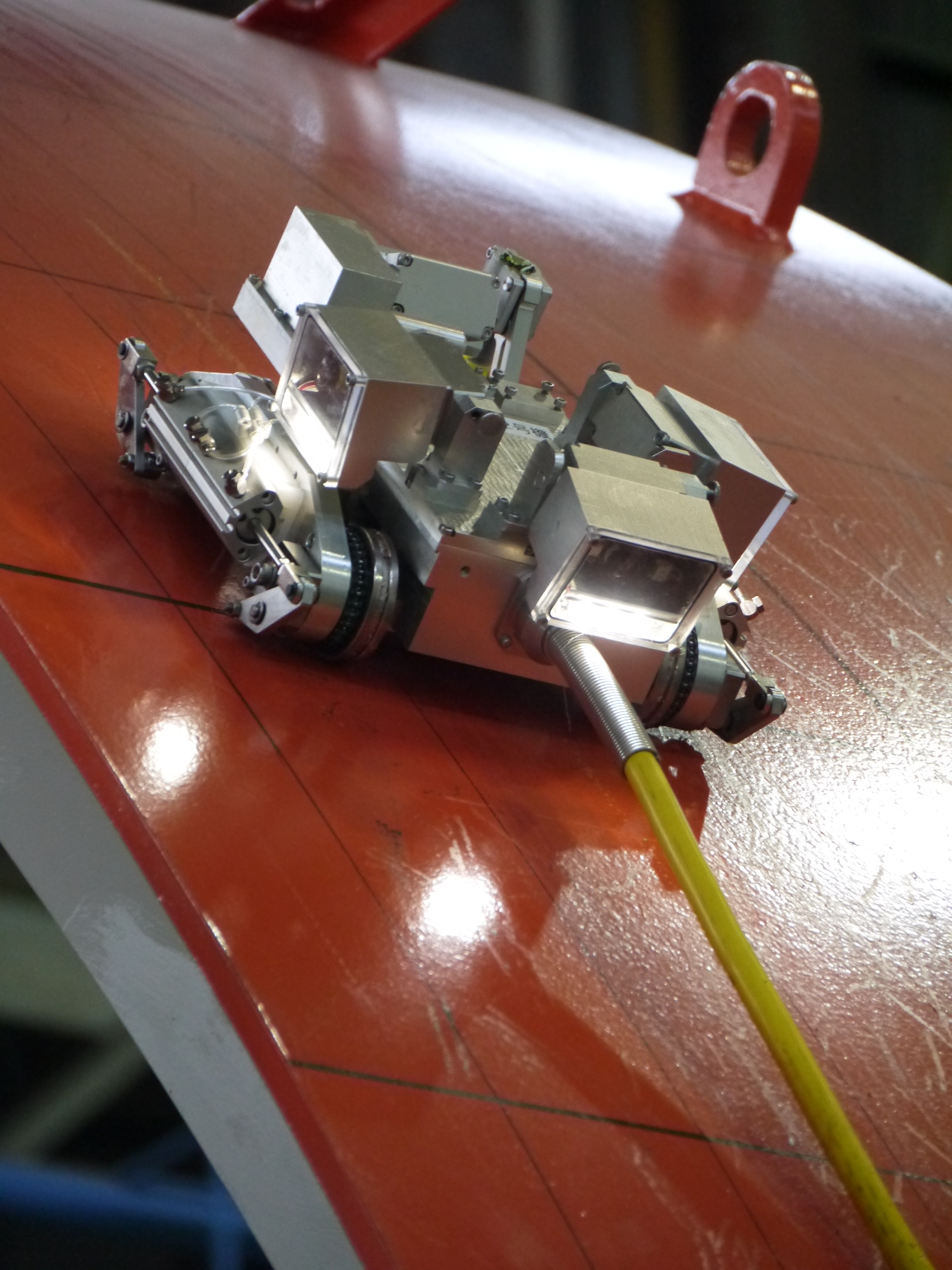
This autonomously maneuverable robot mainly investigates the submerged area to detect holes of 30mm or more in diameter by adhering on the surface of S/C with wheels magnetized by a permanent magnet (neodymium).
This is a device designed to investigate the lower outer surface of S/C to be applied for Fukushima Daiichi NPS Units 1, 2, and 3. It is powered by electricity and air as well as receives signals by the cable.
This robot searches damaged portions using the cameras equipped on its front and back and on its left and right by moving from the inner peripheral side to the outer peripheral side on the S/C outer lower surface. Also, it is capable of marking the place which has already been investigated using a stick-type marking system to avoid repetition.
This device can be separated from the surface of the S/C by jacking up the detachable mechanism that is fixed on the lower part of this device.
2. Device to inspect joint section between drywell and vent pipe (VT-ROV)
This is a device designed to investigate the route part of Vent pipe, driven by the system same as the device investigating the lower outer surface of S/C without bilateral cameras and marking mechanism.
A vehicle designed for Units 1-3 at the Fukushima Daiichi NPS to detect leakage around the joint area between the D/W and the vent pipes with the assumption of “shell attack” (where molten fuel debris has fallen down and spread on the bottom of the D/W, causing damage to the D/W body), etc.
The height of the robot is 90mm, making it capable of entering the gap between the vent pipe and concrete wall that is as narrow in places as approx. 100mm.
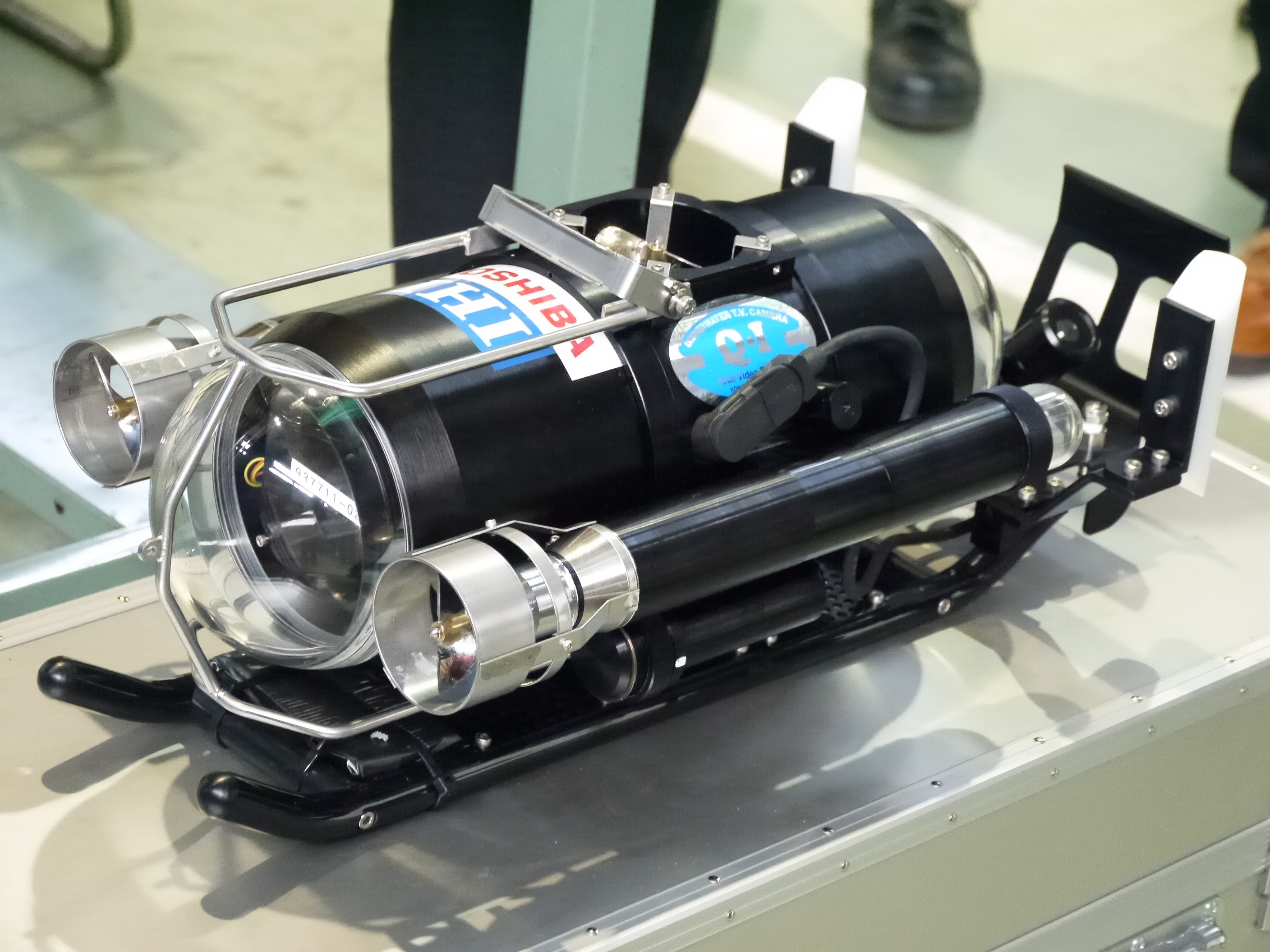
3. Sand cushion drain pipe inspection device (DL-ROV)
This small device that maneuvers underwater is equipped with three thrusters to investigate the sand cushion drain pipe.
It is designed for use in Units 2 and 3 at the Fukushima Daiichi NPS.
The DL-ROV is designed to be positioned at the outlet flange of the drain pipe and investigate whether there is any leakage from the pipe by applying tracer around the drain pipe outlet and observing its flow using a camera mounted on the device.
4. Support equipment (remotely operated manipulator)
Equipment to transfer and retrieve the investigation devices above (1-3) to or from prescribed locations in the Torus room using a manipulator.
In each unit at the Fukushima Daiichi NPS, holes in eight locations will be drilled through the first floor of the building. The support equipment will be placed over each of these holes so that it can deliver and retrieve the devices (1)-(3) using an extendable manipulator into the torus room.
This device consists of the manipulator, the manipulator control device (cable management unit), hydraulic pump for drive supply, and control equipment. Additionally, it is also equipped with functionality that allows it to cut through interfering matter (water jet, shears) and a cable reel mechanism for investigation devices. Subcommittee members observed the device being tested in a scale mockup of an S/C and vent pipe.
The ‘submersion method’ (See video here:https://irid.or.jp/en/video/) currently requires any water leakage points on the PCV caused by damage to be repaired; these devices are all intended to detect where those areas of damage are.
Ongoing testing of these devices will take place at the Engineering Center, as will continuous training using a mockup facility. These devices are to be introduced to Fukushima Daiichi Nuclear Power Station before the end of 2014.
- Suppression Chamber (S/C)
- A doughnut-shaped facility that stores water located in the basement of the reactor building. This facility condenses vapor generated in the case of reactor piping breakage and prevents excess pressure from building up. It also serves the important function of a water source for the Emergency Core Cooling System (ECCS) in the case of a loss-of-coolant accident.
- Vent pipe
- A connecting piping that takes vapor generated within the D/W to the S/C in case of a reactor pipe break. Eight vent pipes are installed in the PCV of Units 1-3 at the Fukushima Daiichi NPS.
- Drywell (D/W)
- The entire PCV, not including the S/C. The drywell is a flask-shaped safety facility that houses the reactor pressure vessel, etc., and is designed to contain the escape of radioactive materials in an accident.
- Sand cushion
- Region underneath the exterior of the D/W base filled with sand to act as a buffer to absorb localized stress in the PCV (base part of the D/W) in case of an accident.
- Drain pipe
- A pipe that releases water accumulated in the sand cushion (see above).
IHI Engineering Center Visit
- [Photos] Click image to enlarge.
- [Videos] Click “Download video” to download MP4 file.
[Photos]

Explaining inspection outline (IRID Fuel Debris Retrieval Technologies Subcommittee members, etc.)

SC-ROV performance test on simulated S/C section
SC-ROV performance test on simulated S/C section

SC-ROV performance test on simulated S/C section

Observing SC-ROV performance test on simulated S/C section





Performance test of SC-ROV on simulated S/C section (ascent)
Performance test of SC-ROV on simulated S/C section (ascent)
Performance test of SC-ROV on simulated S/C section (descent underwater)
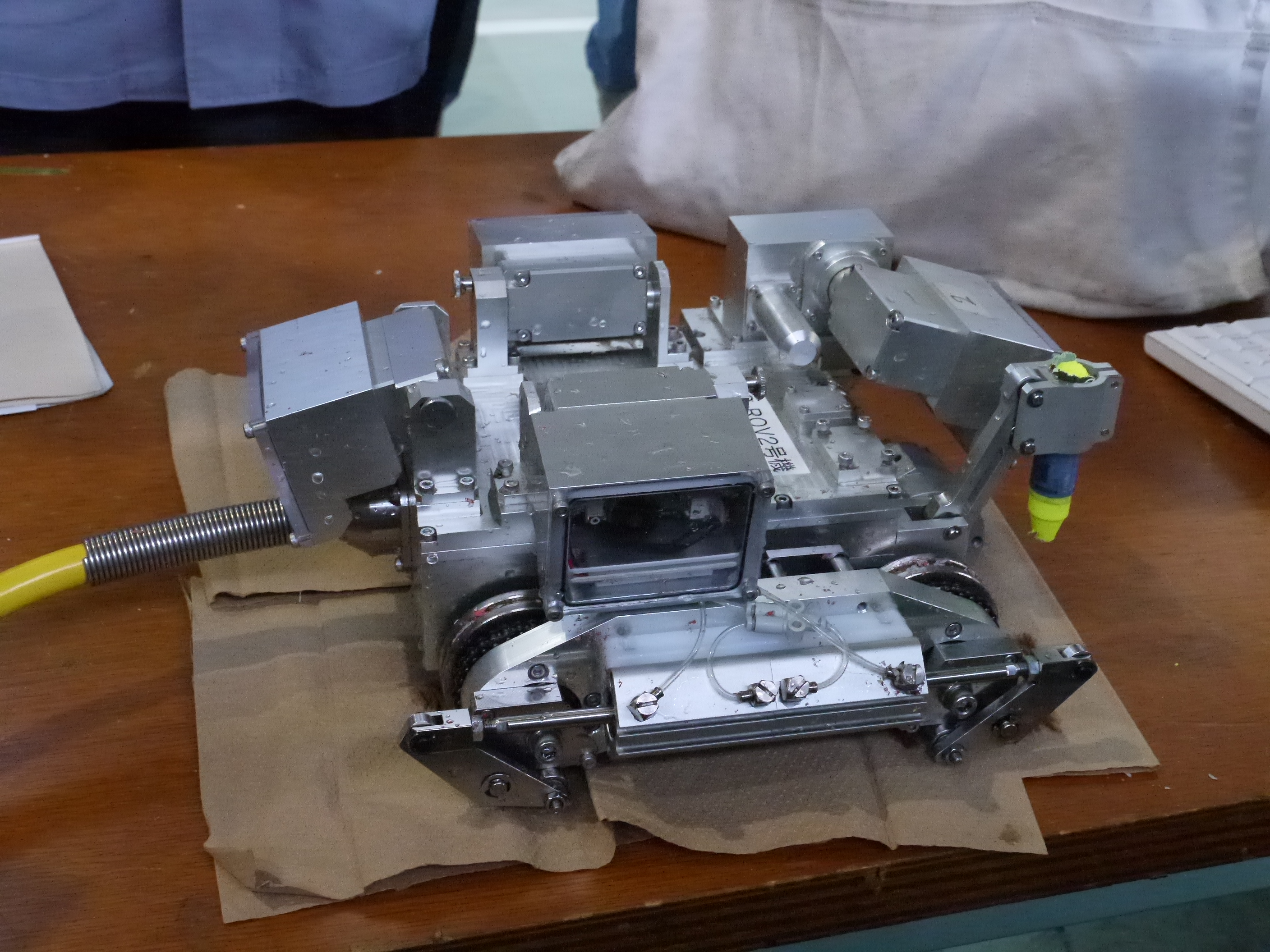
Body of SC-ROV

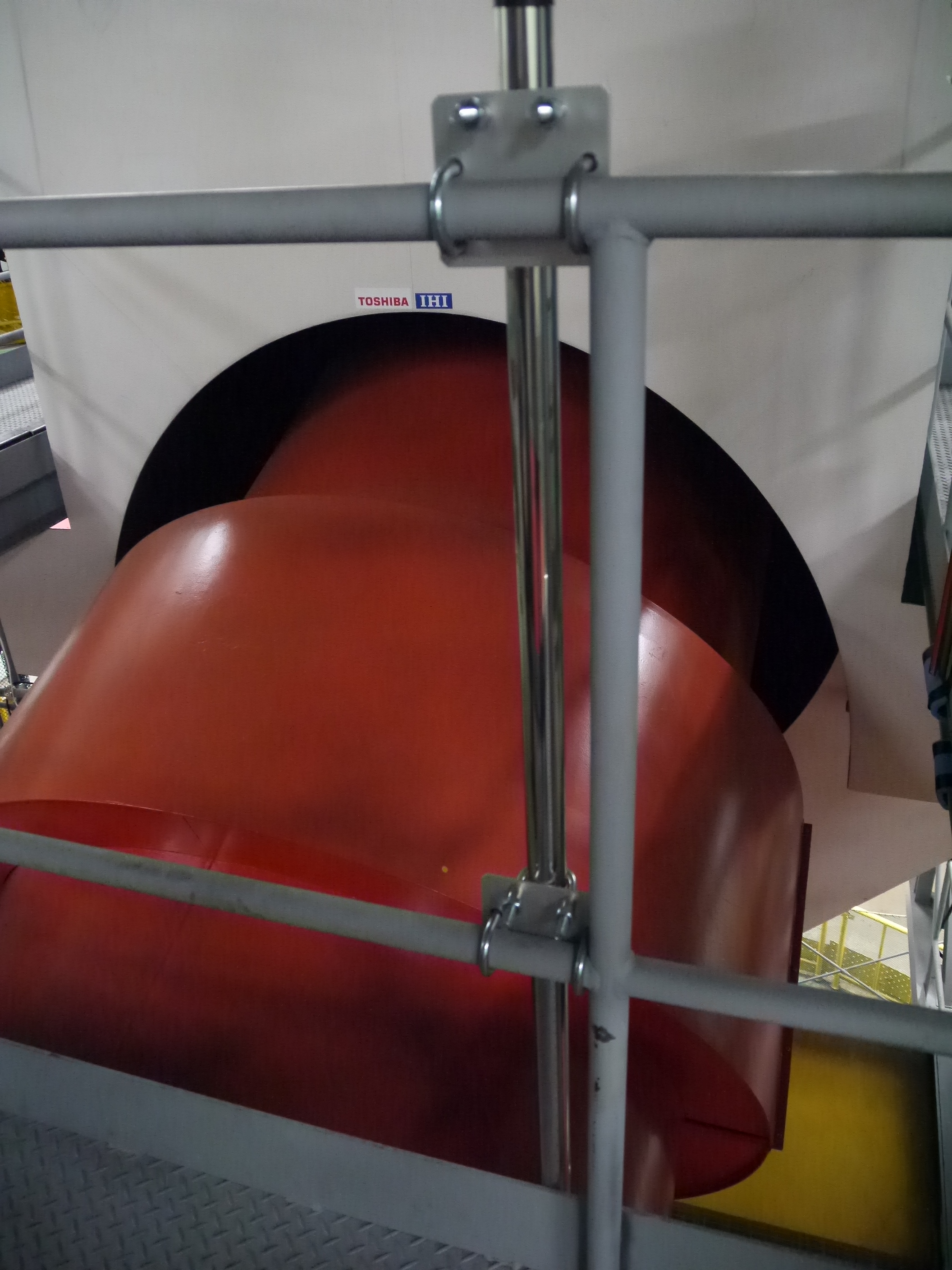
Simulated parts of Vent pipe




Body of VT-ROV (inspection device for joint of D/W-Vent pipe)
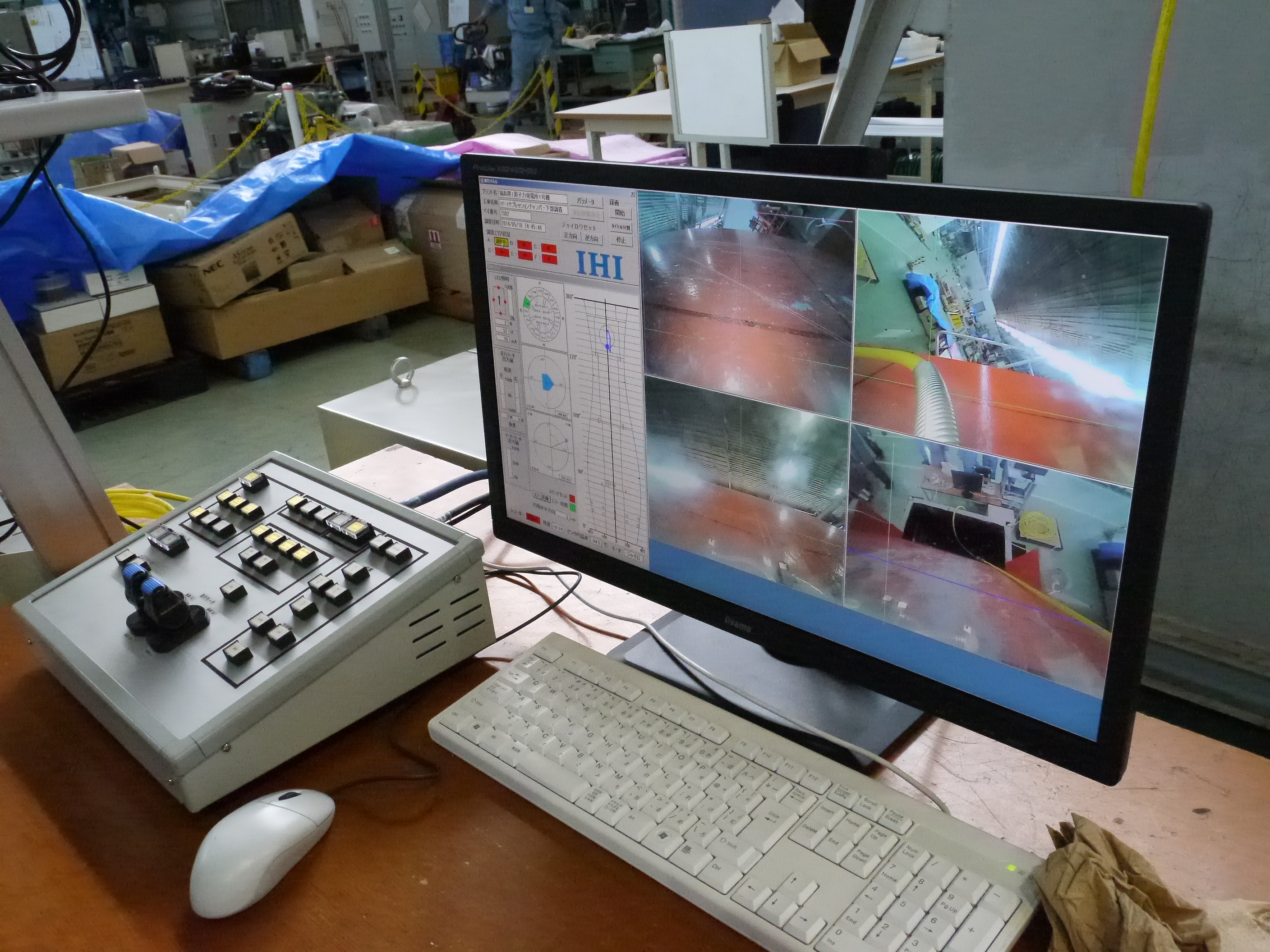
Operation screen of SC-ROV
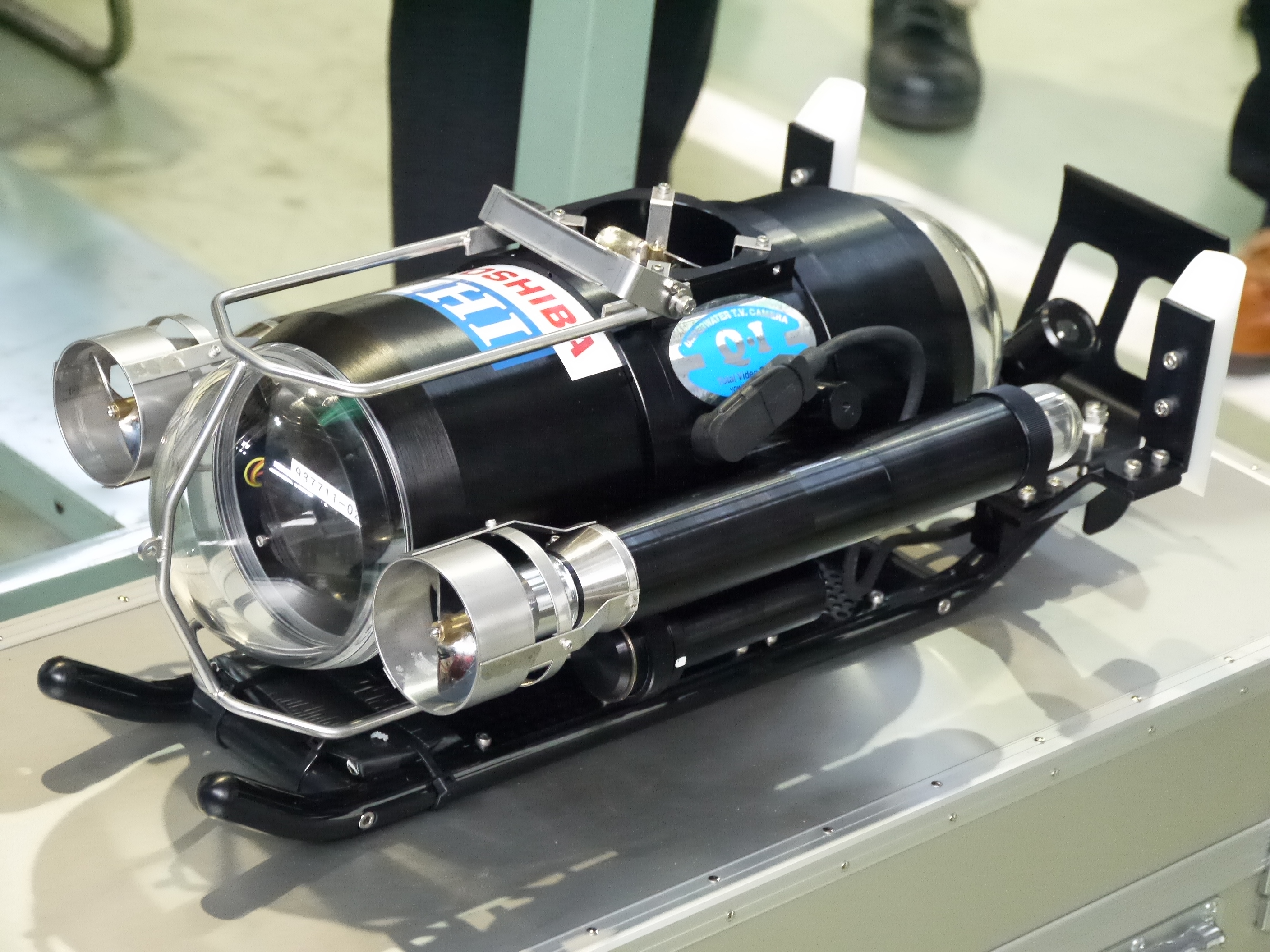
DL-ROV body

DL-ROV front view
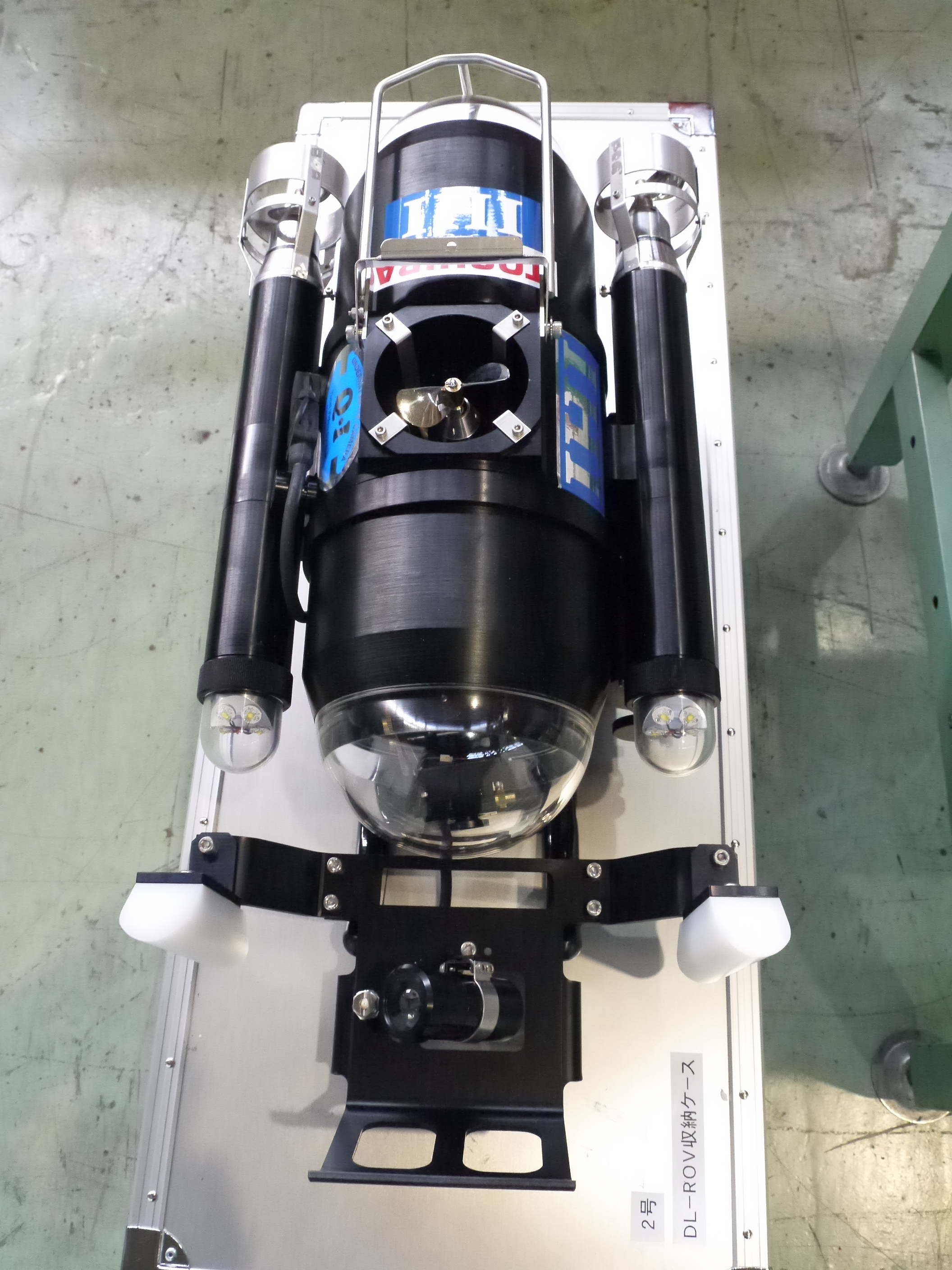
DL-ROV top view





Mockup of vent pipe and S/C (vent pipe opening on D/W side)

Staff explaining simulation test and method of access to location to be inspected
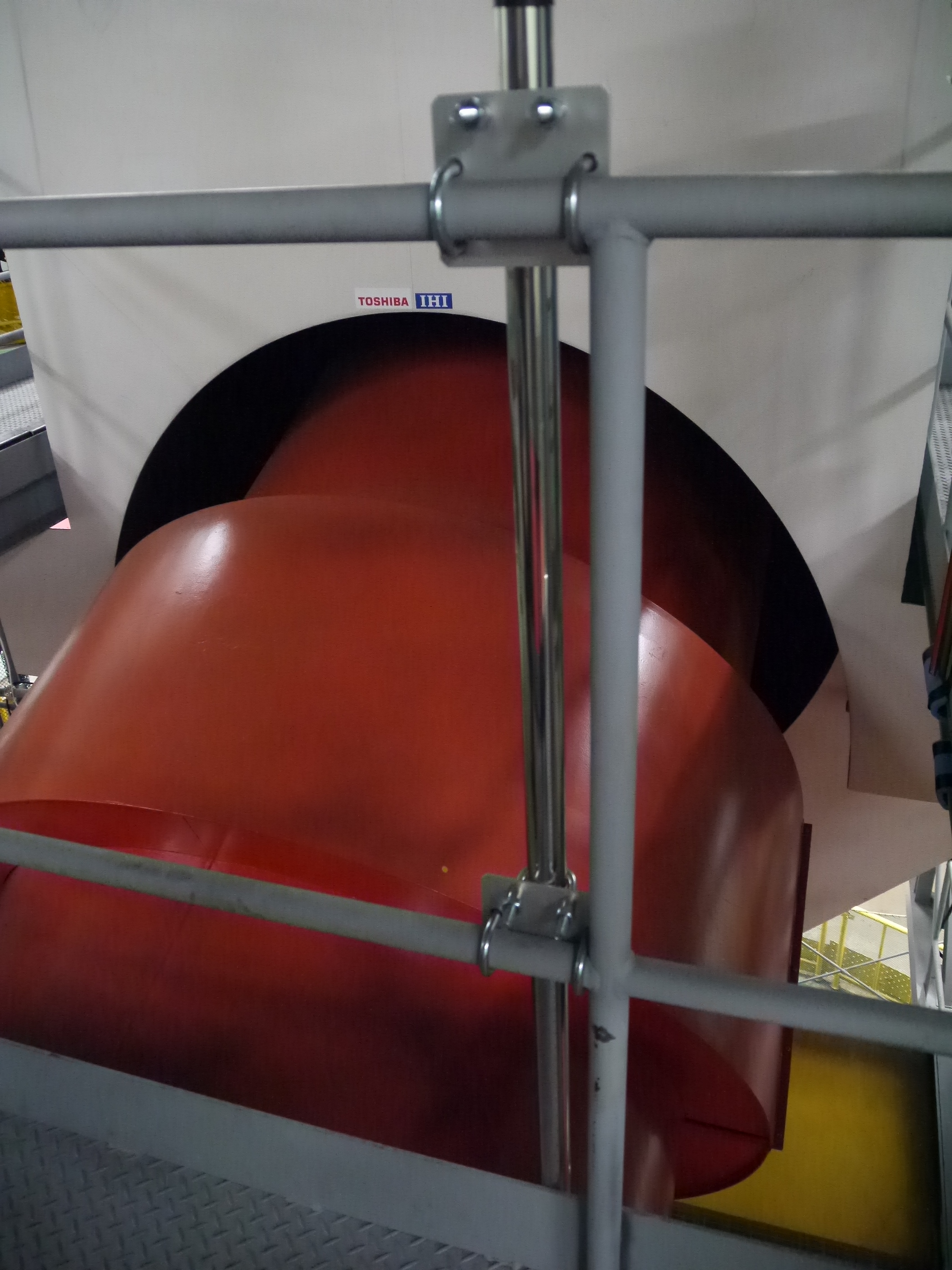
Mockup of vent pipe and S/C (gap between vent pipe and opening in concrete wall)

Remote manipulator device arm

Mockup of vent pipe and S/C (gap between vent pipe and the opening in
concrete wall)





Arm tip of the remote manipulator device

Mock-up of vent pipe and S/C (view from D/W side)

Observing operation of the remote manipulator device

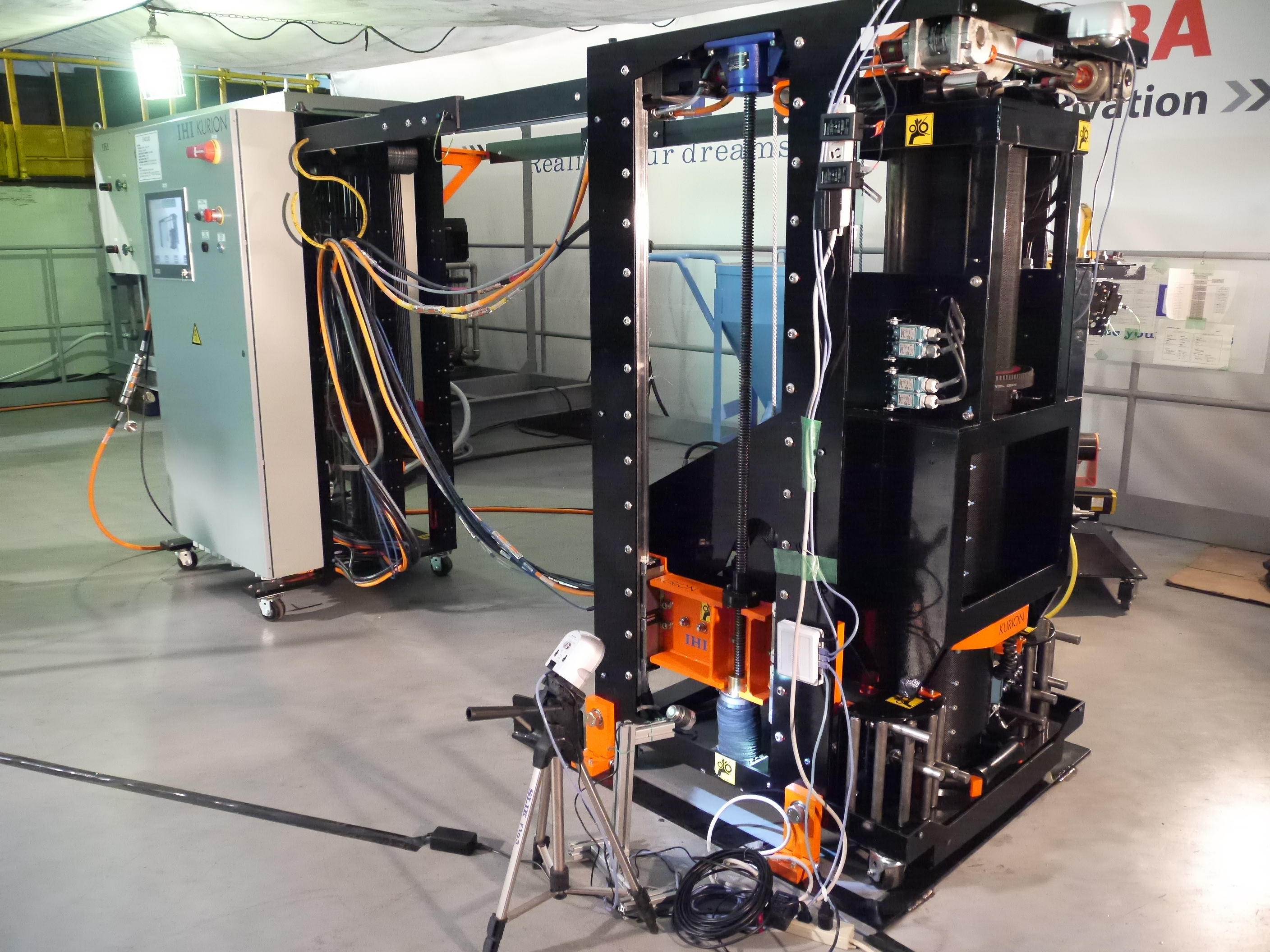
Remote manipulator device
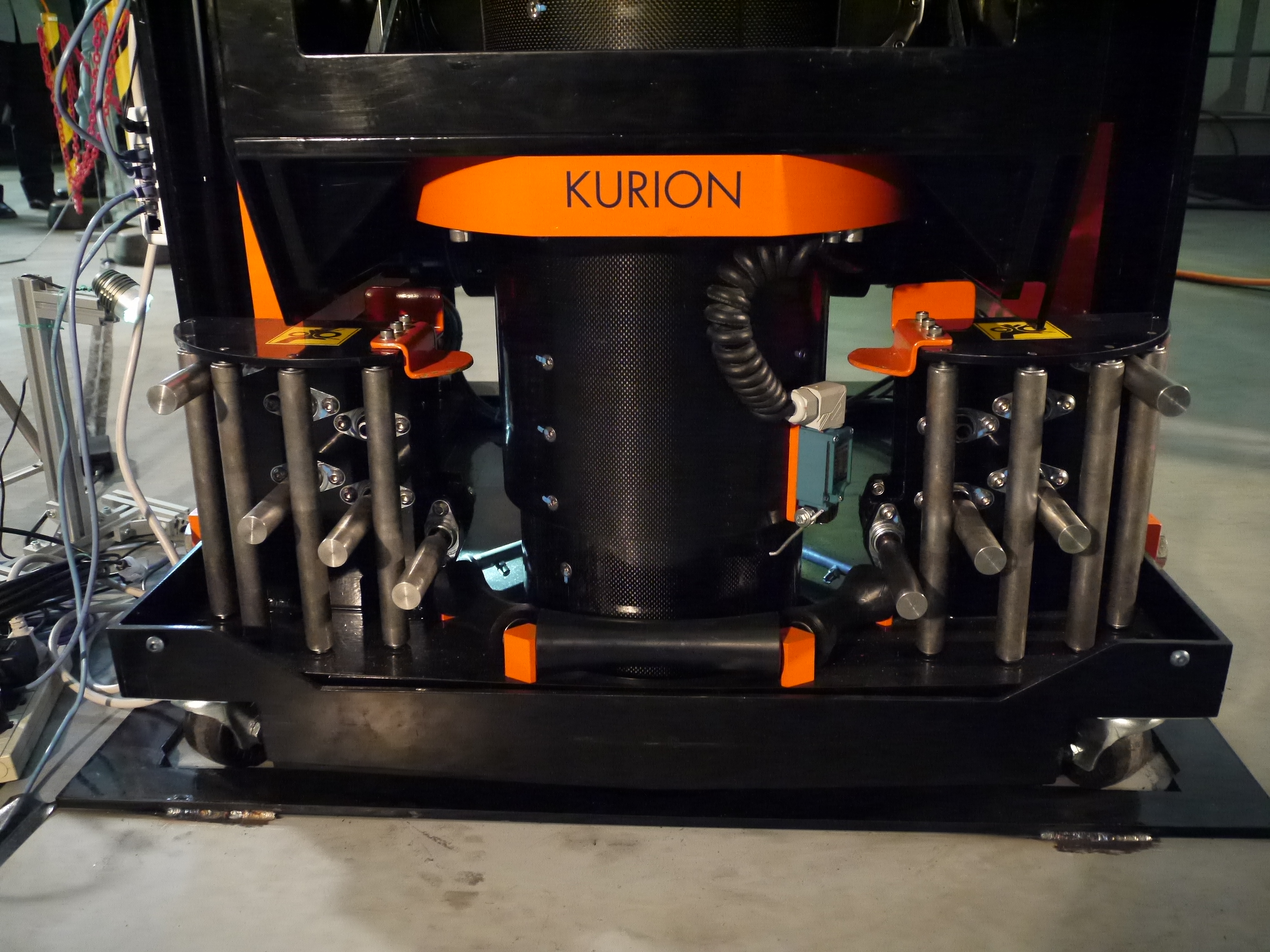
Remote manipulator device (installed on upper floor section access port)




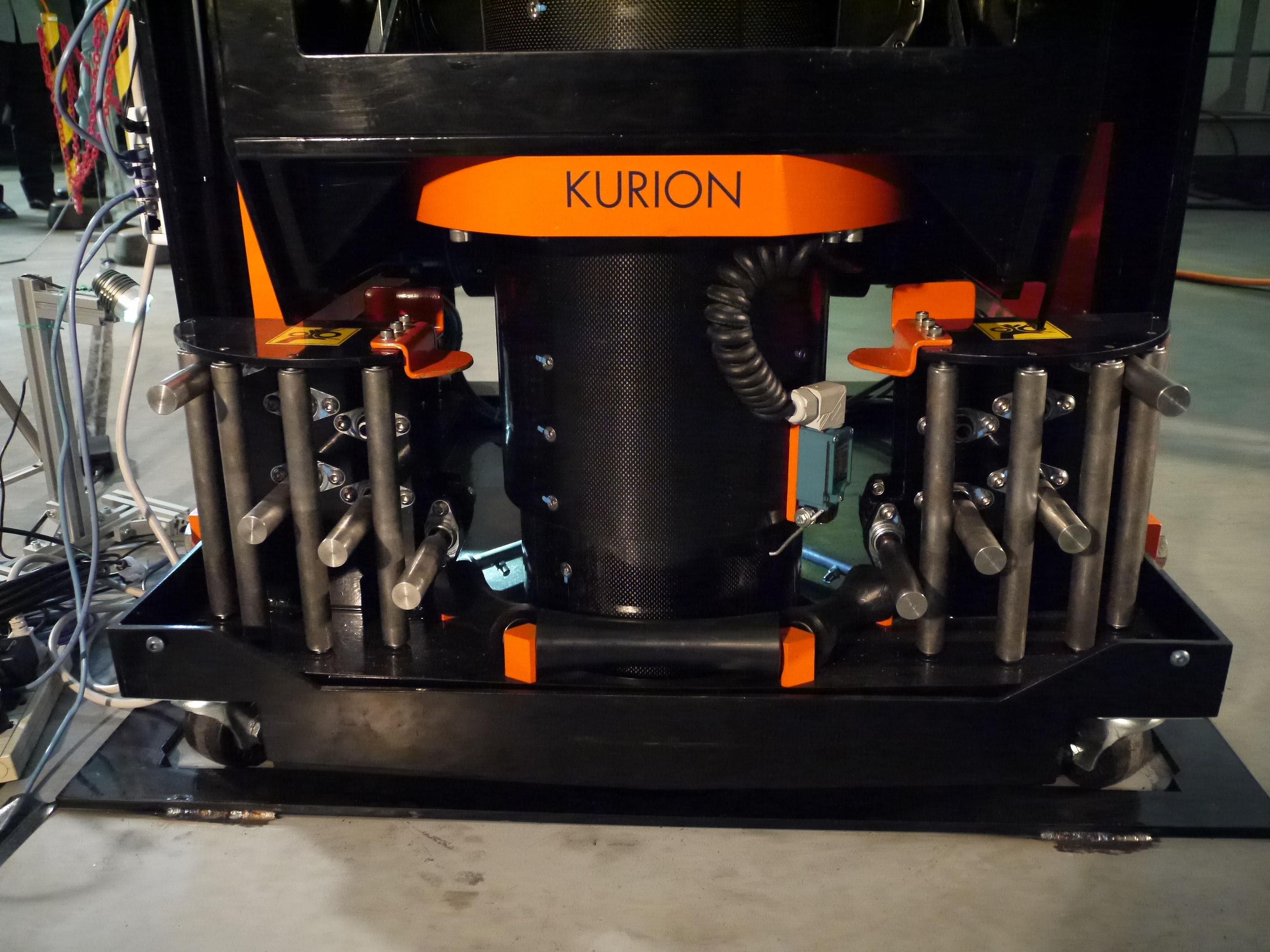
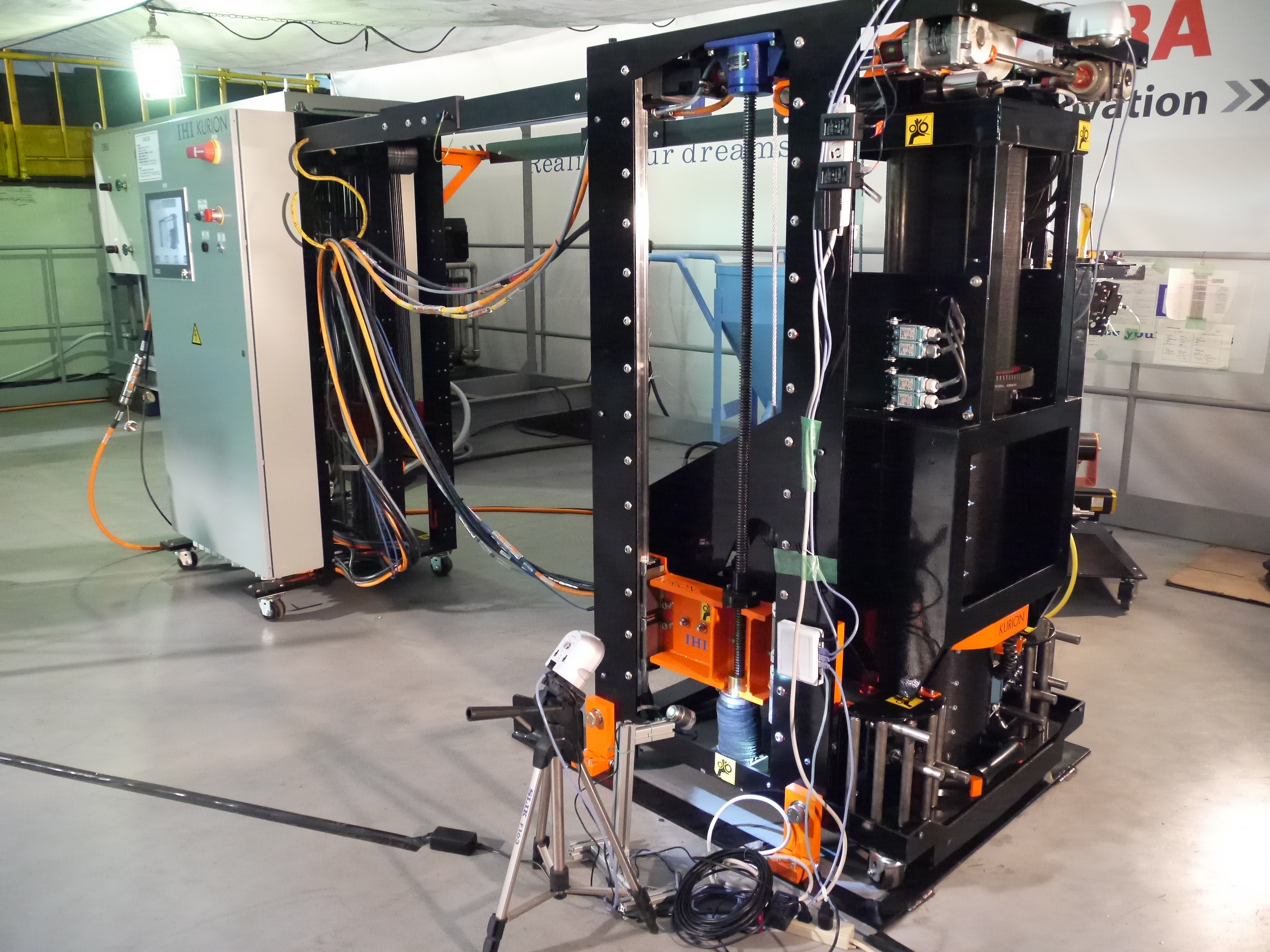
Remote manipulator device body (foreground: arm storage frame, background: tool storage frame)

Subcommittee Chairperson Hajime Asama making comments at the wrap-up meeting.

- Research and Development
- Released research report
- FY 2017 R&D Report
- Introduction Research
- Survey Device (Shape-changing Robot) Deployed to Inspect Interior of Primary Containment Vessel (PCV)
- Work Training of Device (Shape-changing Robot) to Inspect Interior of Primary Containment Vessel (PCV) [Hitachi-GE Nuclear Energy]
- Development status of equipment for internal PCV investigation [TOSHIBA]
- Robots working inside the buildings at Fukushima Daiichi NPS (Part III) Swimming robot & Crawling robot
- Robots working inside the buildings at Fukushima Daiichi NPS (Part II) MHI-MEISTeR
- Robots working inside the buildings at Fukushima Daiichi NPS Rosemary & Sakura
- Development Status of PCV Leakage Investigation Devices (Toshiba)
- Preliminary Test for “Water Stoppage Method” by Grouting into the Vent Pipe