





Development of “Flexible Structure Arm (Muscular Robot)” and Remote Operation Technology for Fuel Debris Retrieval [Developed by HITACHI GE Nuclear Energy] (March 2017)
Mar.22,2017

As part of its R&D efforts for decommissioning of Fukushima Daiichi Nuclear Power Station (NPS), IRID is involved in the Project for Fundamental Technologies for Retrieval of Fuel Debris and Internal Structures; the Subsidy Project of Decommissioning and Contaminated Water Management.
Here, we introduce the R&D status of “Flexible Structure Arm (Muscular Robot)” that deploys remote operation technology as one of the fuel debris retrieval methods.
Development of “Flexible Structure Arm (Muscular Robot)”
・Verification of device operability by applying the flexible structure arm for remote operation, and operability and handling of remote operation based on Partial Submersion Side Entry
・Conducting elemental tests for improvement of the muscular robot and test manufacturing of a crawler type removal of interference objects inside PCV in FY 2016
<Attachment>
・Overview of verification test for flexibility structure arm performance
https://irid.or.jp/wp-content/uploads/2017/03/20170322_1.pdf 
・Hitachi GE Nuclear Energy Muscular robot , type 1 -5
https://irid.or.jp/wp-content/uploads/2017/03/20170322_2.pdf
<Photographs>
 |
 |
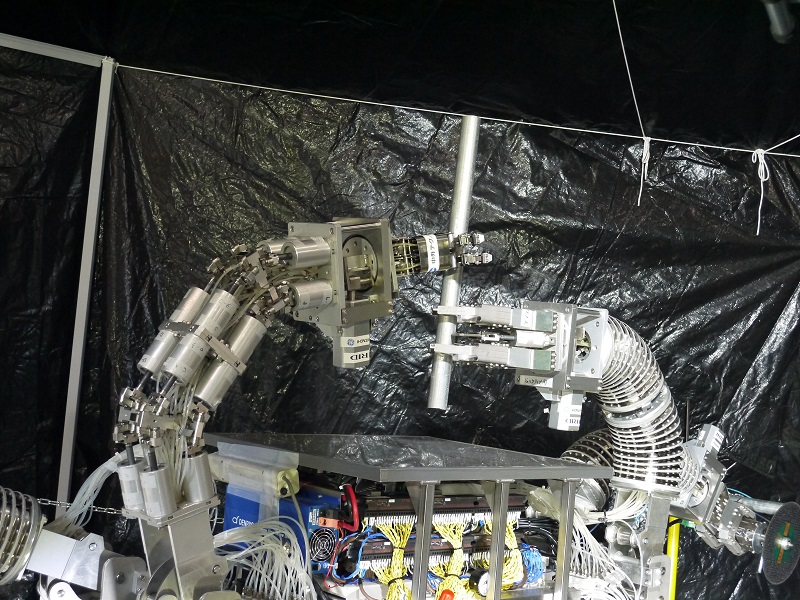
| Demonstration of pipe cutting and storing into a storage canister by Robot 1 (with crawler) (before demonstration) | |
 |
 |
| Demonstration of pipe cutting and storing into a storage canister by Robot 1 (with crawler) | |
 |
 |
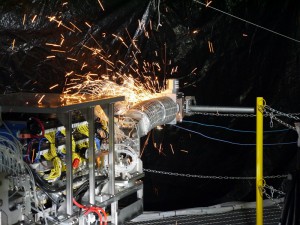
| Demonstration of crushing concrete by Robot 2 with chisel (crusher) (before demonstration) | |
 |
|
| Demonstration of crushing concrete by Robot 2 with chisel (crusher) | |
 |
 |
| Action demonstration of Robot 4 | |
Inquiries regarding this topic may be directed to IRID viaE-mail