





Ongoing Development of “Submergible Crawling Swimming Robot” and “Shape-changing Robot”
Apr.24,2014
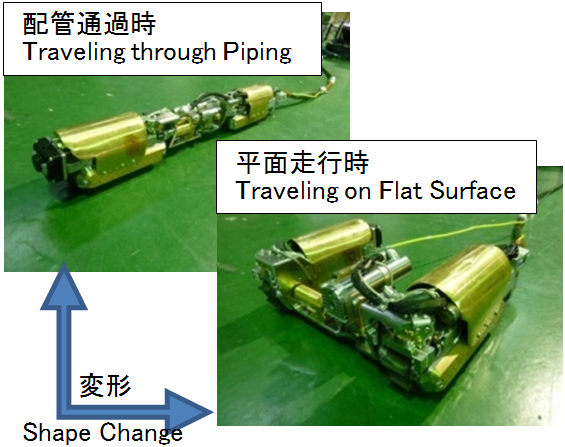
Hitachi-GE Nuclear Energy Ltd. (a member of IRID) and Hitachi Ltd. announced the development of two types of transformer robots that can modify their posture or shape in water or in narrow spaces surrounded by obstacles. These robots will advance to demonstration testing for IRID’s R&D projects, which has following main aims, namely “Inspection of leaking locations of the PCV” and “Investigating the inside of reactor containment vessels. This project is partially funded by the Japanese Ministry of Economy, Trade and Industry (METI).