
燃料取り出しに向けた調査用として水中走行遊泳型ロボット・形状変化型ロボットを開発中です
2014年4月24日

IRID組合員である日立GEニュークリア・エナジー株式会社は株式会社日立製作所と共同して、水中や障害物に囲まれた狭い空間で姿勢や形状を自在に変化させる2種類のロボットを開発してきたところ、それを公表しました。今後、IRIDが進める国の補助事業による研究開発プロジェクトである「格納容器漏えい箇所調査技術開発」や「原子炉格納容器内部調査技術の開発」の一環として、本ロボットの実証等に取り組むこととしています。
「水中走行遊泳型ロボット(クローラ)」は、水で満たされた発電所建屋内を調査するために開発されたロボットで、水中での水平及び垂直の壁面走行と遊泳動作を1台で可能にしたことが特徴です。
これは、原子炉建屋地下階のトーラス室から隣接するタービン建屋に漏えいしている水の状況を把握し、原子炉建屋壁面の状況を確認するために使用される予定で、平成26年度半ば頃より東京電力株式会社福島第一原子力発電所1~3号機での調査に活用される計画です。
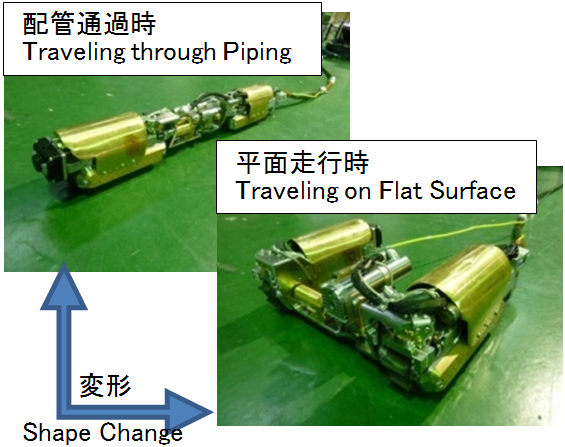
一方、「形状変化型ロボット(クローラ)」は、配管の中を通る際には棒状になり、直径100ミリメートル程度の狭い配管内を走行し、その後、原子炉格納容器の内部でコの字型に変形し調査を行うというものです。
これは、原子炉建屋内の格納容器内部の状況を把握するために狭隘なアクセス口(内径100ミリメートル)から格納容器に進入しペデスタル外側1階のグレーチング(側溝の蓋等に用いる格子状の鋼材)上の調査を行うために使用される計画です。
具体的には、まず、福島第一原子力発電所1号機において、平成26年度下期に本ロボットを格納容器内部に投入して実証試験を行う予定です。
※本件に係る関連の公表資料は、以下をご覧ください。
株式会社日立製作所・日立GEニュークリア・エナジー株式会社の共同プレスリリース
http://www.hitachi.co.jp/New/cnews/month/2014/03/0310e.html
http://www.hitachi.com/New/cnews/month/2014/03/140310e.html (英語)
<経済産業省 廃炉・汚染水対策チーム会合/事務局会議
平成26年2月27日 資料3-6> 燃料取り出し準備
・国プロ「原子炉格納容器の水張りに向けた調査・補修(止水)技術の開発」(調査)等の成果活用について
http://www.meti.go.jp/earthquake/nuclear/pdf/140227/140227_02ss.pdf
・国プロ「原子炉格納容器内部調査技術の開発」の成果活用について
http://www.meti.go.jp/earthquake/nuclear/pdf/140227/140227_02tt.pdf
本件に関するお問い合わせはこちら