
宇宙線ミュオンによる炉内の燃料位置調査に向けて、福島第一原子力発電所で測定システム設計のための準備試験を実施しました
2014年8月20日

IRIDではこのほど、福島第一原子力発電所において、「ミュオン透過法」の測定システムを設計するための準備試験を実施しましたのでお知らせします。
汚染水処理に伴う二次廃棄物の長期保管方策の検討結果を公表しました
2014年7月11日

今般、国際廃炉研究開発組合のメンバーである日本原子力研究開発機構(JAEA)は、東京電力福島第一原子力原子力発電所の汚染水処理に伴って保管している廃ゼオライト及び廃スラッジの安全性について検討を行い、その結果、発生する水素や放射線分解反応による安全性に問題が無いものと評価されると公表しました。
研究開発中の「PCV(格納容器)下部補修技術」試験の進捗状況についてお知らせします
2014年5月30日

廃炉を進める福島第一原子力発電所において、格納容器(PCV)からの漏えい箇所を特定し補修することは、増え続ける汚染水の発生量を抑制するだけでなく、中長期ロードマップの燃料デブリ取り出しに向けたデブリ冠水にとっても必要不可欠なものです。今回は、経済産業省の補助事業によりIRIDが研究開発を進めている「格納容器漏えい箇所特定技術・補修技術開発/PCV下部補修技術」の試験の進捗状況をお知らせします。
立木の放射能を分析し、構内の汚染状態を評価しています
2014年5月9日

今般、東京電力株式会社福島第一原子力発電所構内にある「立木」の放射能分析を行いました。これは将来、同構内から発生した放射性廃棄物を処理・処分する段階において、その方策を検討するにあたって、必要となる基礎データの蓄積・評価を行うため、研究の一環として行ったものです。これは、経済産業省の委託事業として、IRIDのもと、日本原子力研究開発機構(JAEA)が中心となって進めている研究(「放射性廃棄物処理・処分技術開発」の内、「福島第一原子力発電所構内で採取した立木の放射能分析」)です。
燃料取り出しに向けた調査用として水中走行遊泳型ロボット・形状変化型ロボットを開発中です
2014年4月24日
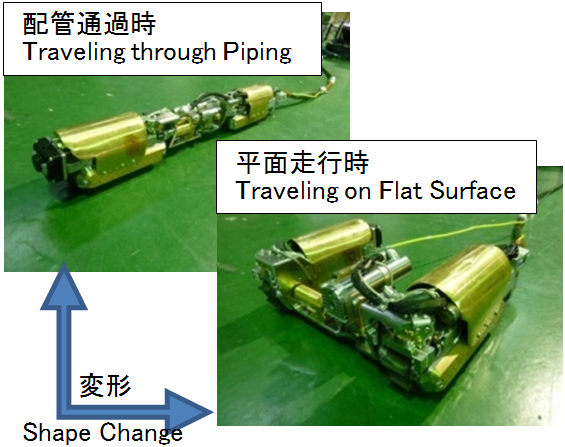
IRID組合員である日立GEニュークリア・エナジー株式会社は株式会社日立製作所と共同して、水中や障害物に囲まれた狭い空間で姿勢や形状を自在に変化させる2種類のロボットを開発してきたところ、それを公表しました。今後、IRIDが進める国の補助事業による研究開発プロジェクトである「格納容器漏えい箇所調査技術開発」や「原子炉格納容器内部調査技術の開発」の一環として、本ロボットの実証等に取り組むこととしています。
原子炉建屋内の遠隔除染作業ロボット「MHI-MEISTeR(マイスター)」の実証試験が終了しました
2014年3月25日
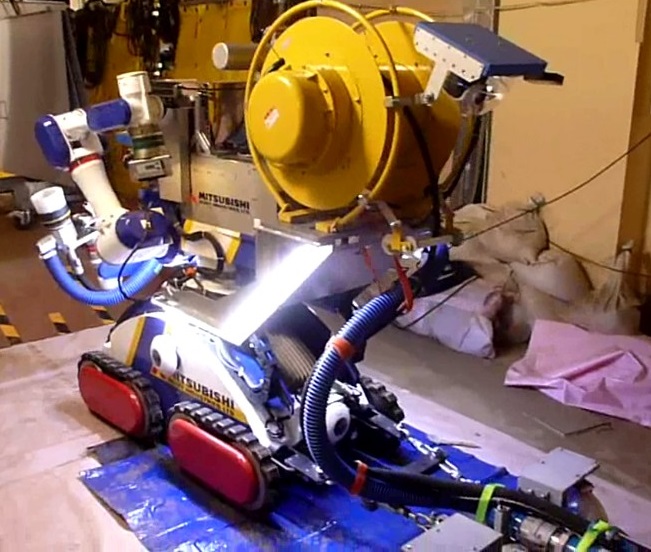
このたび、経済産業省の補助事業により開発された除染装置「MHI-MEISTeR(マイスター)」(三菱重工業株式会社開発)が、東京電力株式会社福島第一原子力発電所において、遠隔操作による除染作業の実証試験ならびにコンクリートコアサンプル採取を完了しました。