




Work Training of Device (Shape-changing Robot)
to Inspect Interior of Primary Containment Vessel (PCV)
[Hitachi-GE Nuclear Energy]
(February 3, 2015)
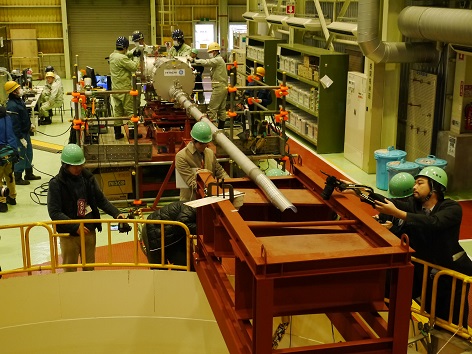
On February 3, 2015, IRID’s Technology Advisory Committee, comprised primarily of members of the Fuel Debris Retrieval Technologies Subcommittee, viewed test runs of a device (a shape-changing robot) designed to inspect the interior of the Primary Containment Vessel (PCV) that is planned to undergo operational testing at Unit 1 of the Fukushima Daiichi Nuclear Power Station. The same robot was shown to the media two days later on February 5.
The subcommittee members viewed the robot, which IRID member Hitachi-GE Nuclear Energy is responsible for developing, at a plant owned by Hitachi-GE Nuclear Energy in Hitachi, Ibaraki Prefecture.
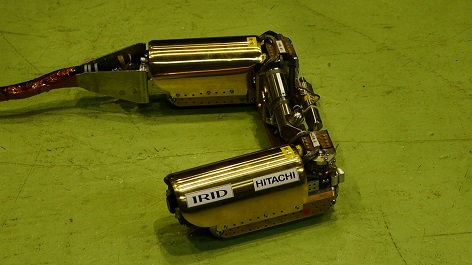
As its name suggests, the shape-changing robot must first take on a tubular form in order to traverse a pipe with a diameter of 10 cm to reach the inside of the containment vessel. Once it has reached the interior of the containment vessel, the robot bends in order to avoid any obstacles while it is lowered by cable onto the grating on the 1st floor outside the pedestal (the structure which supports the reactor containment vessel). To achieve stability when maneuvering, the robot expands into a U shape at this point. It then can gather detailed information about conditions inside the containment vessel, taking live images with an onboard camera and capturing temperature and radiation levels; this data will be collated and used in preparation for the future step of fuel debris retrieval. Once it has finished its survey of the reactor, the robot will take the above steps in reverse and be stored in a shielded box outside the containment vessel.
The robot is planned to be the first to enter the damaged reactor’s containment vessel. Practice runs will continue until actual surveying commences in April/May 2015.
Based on the information gathered inside the containment vessel by the shape-changing robot, IRID hopes to make further improvements to other devices that will be used, using these to survey the bottom of the containment vessel (basement level) and the fuel that is thought to have melted and settled there towards the end of 2015.
*Video shows the robot entering a mock-up of the containment vessel, including it emerging from the pipe and making its way to the grating, and of it changing shape.
Visit by the Technology Advisory Committee
- [Photos] Click image to enlarge.
- [Videos] Click “Download video” to download MP4 file.
[Photos]

Fuel Debris Retrieval Technologies Subcommittee inspection (1) (Feb. 3)

Fuel Debris Retrieval Technologies Subcommittee inspection (2) (Feb. 3)

Fuel Debris Retrieval Technologies Subcommittee (Feb. 3)

Shape-changing robot (tubular form for passing through pipes)

Robot changing into U shape.





Shape-changing robot (running on grating)

Robot storage equipment. It is affixed with a guide pipe 10 cm in diameter.

Sending the shape-changing robot into the PCV.

The robot passing through the 10 cm diameter guide pipe.

The robot being lowered via cable.





Reaching the 1st floor of the containment vessel.

Transformation into U shape for greater maneuvering stability.

Deputy Manager, R&D Management Dept, Endo (IRID) addresses the media.

Hitachi-GE senior engineer Yoshinori Takahashi explains the features of the robot.

Hitachi-GE senior engineer Yoshinori Takahashi responds to questions from the assembled media.





- Research and Development
- Released research report
- FY 2017 R&D Report
- Introduction Research
- Survey Device (Shape-changing Robot) Deployed to Inspect Interior of Primary Containment Vessel (PCV)
- Work Training of Device (Shape-changing Robot) to Inspect Interior of Primary Containment Vessel (PCV) [Hitachi-GE Nuclear Energy]
- Development status of equipment for internal PCV investigation [TOSHIBA]
- Robots working inside the buildings at Fukushima Daiichi NPS (Part III) Swimming robot & Crawling robot
- Robots working inside the buildings at Fukushima Daiichi NPS (Part II) MHI-MEISTeR
- Robots working inside the buildings at Fukushima Daiichi NPS Rosemary & Sakura
- Development Status of PCV Leakage Investigation Devices (Toshiba)
- Preliminary Test for “Water Stoppage Method” by Grouting into the Vent Pipe