
燃料デブリの気中・横取り出しの要素技術の一つであるロボットアームとアクセスレールの組合せ動作性確認試験について[開発担当:三菱重工業](2019年度上期)
2019年10月10日


福島第一原子力発電所の燃料デブリ取り出しは、小規模のものから始め、燃料デブリの性状や作業経験などから得られる新たな知見を踏まえ、作業を柔軟に見直しつつ、段階的に取り出し規模を拡大していくこととされています。ロボットアームとアクセスレールは、燃料デブリの気中・横取り出しの要素技術の一つとして開発されてきたものであり、燃料デブリ取り出しが始まり、段階的に規模が拡大していく中で使われることを想定したものです。
(動作性確認試験の成果)
(1) ロボットアームとアクセスレールを組み合せた動作性確認
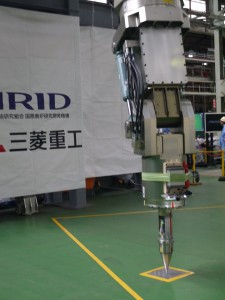
・4トンの高重量、かつ、重心が台車よりも前方にあるロボットアームを、アクセスレールの接続部段差を通過して、ペデスタル内に案内できることを確認しました。
・実機を想定した暗闇環境において、アクセスレール敷設、ロボットアームの燃料デブリへのアクセスという一連作業が、装置に設置した照明・カメラで精度を高めて遠隔で行えることを確認しました。
(2) その他
駆動源喪失を想定した非常脱出模擬試験を実施し、ロボットアーム、アクセスレールのセル内への回収要領についても確立しました。
2019年度上期に公開したものは試作機です。引き続き、改良を進めてまいります。
【参考資料】
平成28年度補正予算「廃炉・汚染水対策事業費補助金」「燃料デブリ・炉内構造物の取り出し基盤技術の高度化」 ロボットアーム/アクセスレール組合せ動作性確認試験
(平成31年4月24日)
https://irid.or.jp/wp-content/uploads/2017/07/20170731_01.pdf 
■動画や写真
<組合せ動作性確認試験>

※ロボットアームとアクセスレールの組合せ動作性確認試験の動画はこちらをご覧ください。
(YouTubeのサイトにリンクします)
本件に関するお問い合わせはこちら