
燃料デブリ取り出しにおける遠隔作業技術・「柔構造アーム(筋肉ロボット)」の開発状況について[開発担当:日立GEニュークリア・エナジー](2017年3月)
2017年3月22日

IRID(開発担当:日立GEニュークリア・エナジー)では、福島第一原子力発電所の廃炉に向けた研究開発の取組のひとつとして、廃炉・汚染水対策事業費補助金・燃料デブリ・炉内構造物取り出しの基盤技術開発事業をおこなっております。
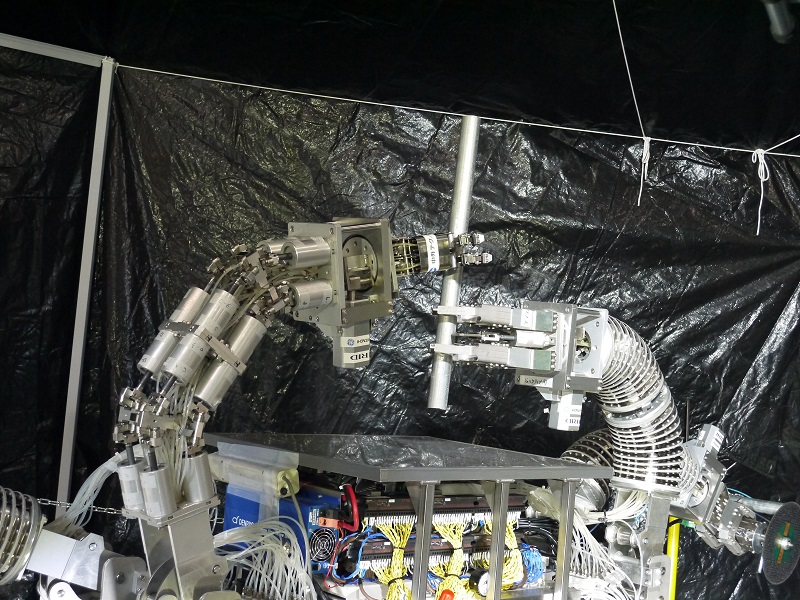
今回は、燃料デブリ取り出し工法のひとつである、燃料デブリ取り出しにおける遠隔作業技術「柔構造アーム(筋肉ロボット)の研究開発状況」をご紹介します。
●「柔構造アーム(筋肉ロボット)」の研究開発状況
・気中―横アクセス工法を念頭に、遠隔作業用柔構造アームを応用した装置のアクセス性、遠隔作業の操作性およびハンドリングといった作業性を確認している。
・28年度については、PCV内干渉物撤去に向けた筋肉ロボットの改良やクローラ型試作機等を製作し、要素試験を実施中。
<添付資料>
・柔構造アーム機能性確認試験概要
https://irid.or.jp/wp-content/uploads/2017/03/20170322_1.pdf 
・日立GE筋肉ロボット タイプ1~5
https://irid.or.jp/wp-content/uploads/2017/03/20170322_2.pdf
<動画:試作機の動作試験> ※YouTubeのサイトにリンクします。
 |
|
 |
 |
<参考写真>
 |
 |
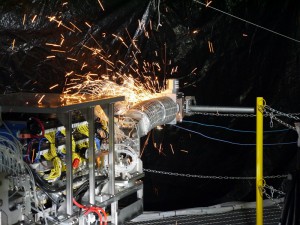
| ロボット1(足まわりはクローラ)による配管切断、収納容器への収納デモ | |
 |
 |
| ロボット1(足まわりはクローラ)による配管切断、収納容器への収納デモ | |
 |
 |
| ロボット2にチゼル(破砕機)を持たせたコンクリート破砕のデモ(デモ実施前) | |
 |
|
| ロボット2にチゼル(破砕機)を持たせたコンクリート破砕のデモ | |
 |
 |
| ロボット4の動作デモ | |
本件に関するお問い合わせはこちら