
ペデスタル内アクセス装置の試験・「ロボットアーム/アクセスレール」の開発状況について[開発担当:三菱重工業](2017年3月)
2017年3月21日


IRID(開発担当:三菱重工業)では、福島第一原子力発電所の廃炉に向けた研究開発の取組のひとつとして、廃炉・汚染水対策事業費補助金・燃料デブリ・炉内構造物取り出しの基盤技術開発事業をおこなっております。
今回は、燃料デブリ取り出し工法のひとつである、気中-横アクセス工法で重要なアクセス技術となる、「ペデスタル内アクセス装置の研究開発状況」をご紹介します。
(1)アクセスレールの研究開発
<アクセスレール機能>
・燃料デブリ取り出しのためのロボットアームの、ペデスタル内への案内
(ペデスタル中央までの案内を想定)
・燃料デブリ収納ユニット缶の、作業セル⇔ペデスタル内の移送
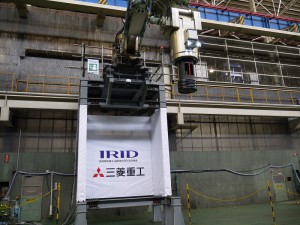
(2)ロボットアームの研究開発
<ロボットアーム仕様>
・先端負荷:2,000kg(径60mm程度のコアボーリングを想定)
・アーム長:7,100mm(RPV底部からペデスタル底面下1.5mまでのアクセスを想定)
・多軸(6軸)による、高い位置決め精度
<添付資料:「アクセスレール・ロボットアーム概要資料」>
https://irid.or.jp/wp-content/uploads/2017/03/20170321.pdf 
<動画映像> ※YouTubeのサイトにリンクします。
 |
 |
| 32倍速 アクセスレール(サイドビュー) | 32倍速 アクセスレール(フロントビュー) |
 |
|
| ロボットアーム 編集動画 |
<参考写真>
【アクセスレール】
 |
 |
 |
 |
 |
【ロボットアーム】
 |
 |
 |
 |
 |
本件に関するお問い合わせはこちら