





Ongoing Development of “Submergible Crawling Swimming Robot” and “Shape-changing Robot”
Apr.24,2014

Hitachi-GE Nuclear Energy Ltd. (a member of IRID) and Hitachi Ltd. announced the development of two types of transformer robots that can modify their posture or shape in water or in narrow spaces surrounded by obstacles. These robots will advance to demonstration testing for IRID’s R&D projects, which has following main aims, namely “Inspection of leaking locations of the PCV” and “Investigating the inside of reactor containment vessels. This project is partially funded by the Japanese Ministry of Economy, Trade and Industry (METI).
“Submergible Crawling Swimming Robot (crawler)” was developed to investigate water-filled areas in reactor buildings. This robot can climb horizontal and vertical walls and can also swim in the PCV.
The robot will check leakage points from the torus rooms to the adjacent turbine building on the basement floor. It will also check the condition of the building walls. Investigation of Units 1, 2, and 3 in TEPCO’s Fukushima Daiichi Nuclear Power Station (NPS) is scheduled from the middle of FY 2014.
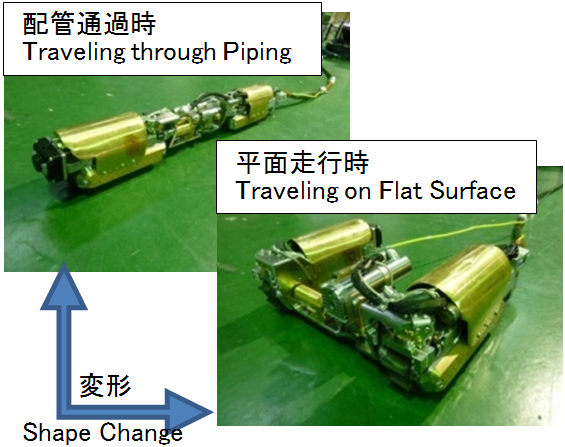
“Shape-changing Robot (crawler)” maintains its bar shape when traveling through the piping to PCV (approximate diameter = 100 mm), and transforms into a U-shape when investigating the PCV.
This robot is expected to enter the PCV from the narrow access entrance (with a diameter of 100 mm), and stably travel across the flat lattice-shaped gratings on the 1st floor of the pedestal during the investigation.
Demonstration testing of this robot at Unit 1 of the PCV in Fukushima Daiichi NPS is scheduled for the latter half of FY 2014.
※Joint news release by Hitachi-GE Nuclear Energy, Ltd. and Hitachi, Ltd.
http://www.hitachi.co.jp/New/cnews/month/2014/03/0310e.html (Japanese)
http://www.hitachi.com/New/cnews/month/2014/03/140310e.html (English)
※Progress Status and Future Challenges of the Mid-and-Long-Term Roadmap towards the Decommissioning of TEPCO’s Fukushima Daiichi Nuclear Power Station Units 1-4 (Outline) (February 27, 2014) p.11
http://www.meti.go.jp/english/earthquake/nuclear/decommissioning/pdf/20140227-e.pdf (English)
Inquiries regarding this topic may be directed to IRID via E-mail