





Improved Robot for Investigation inside the Primary Containment Vessel (Scorpion Robot) [Developed by TOSHIBA CORPORATION] (Feb. 18, 2016)
Feb.18,2016
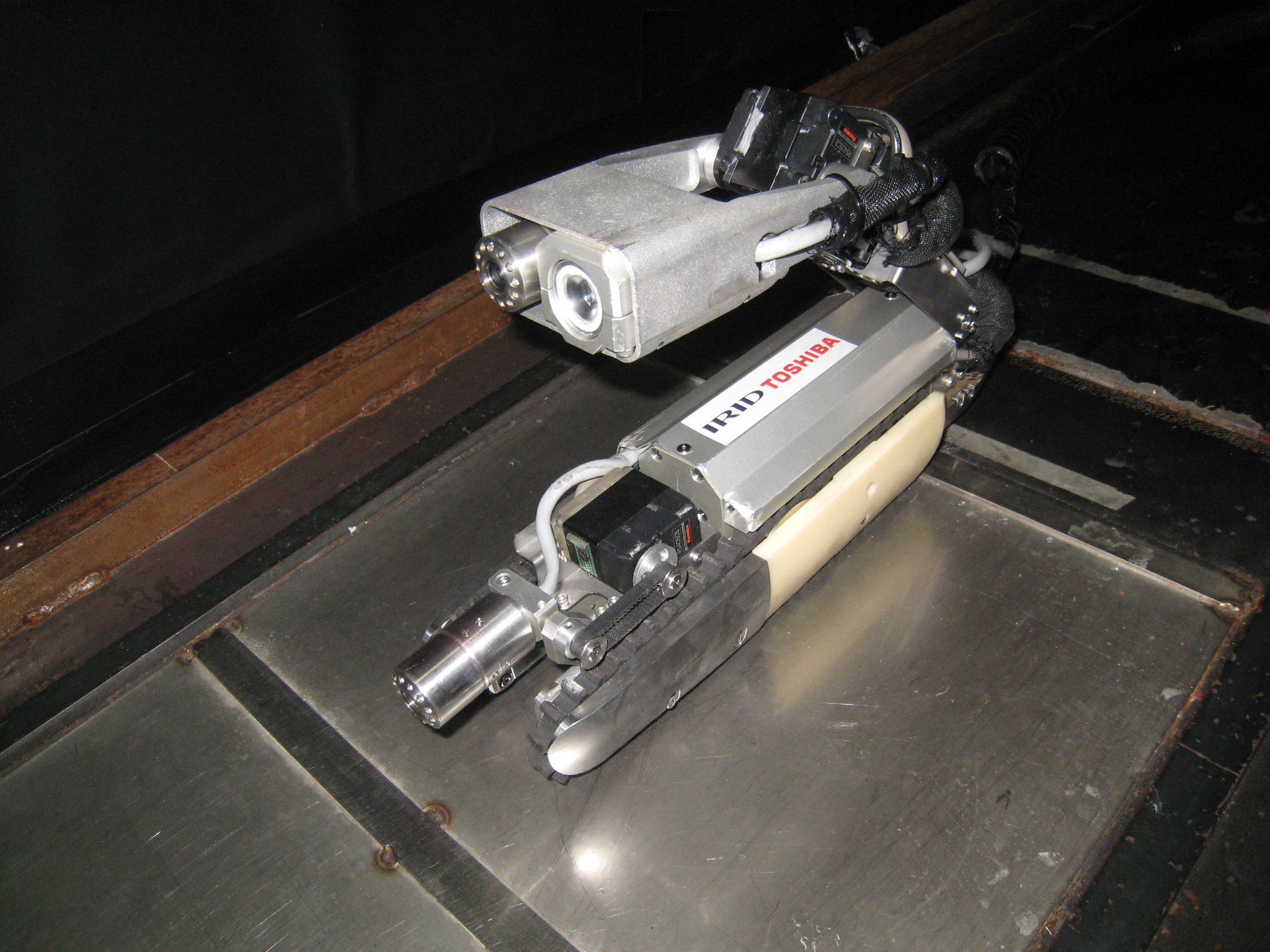
IRID plans to deploy an improved remotely-operated robot (scorpion robot) to investigate inside the Primary Containment Vessel (PCV) at the Fukushima Daiichi Nuclear Power Station Unit2 as soon as it completes on-site preparations, including investigation and decontamination work around a penetration that is to be used as an insertion opening through which the investigation robot will be inserted.