
PCV内部調査装置(サソリ型ロボット)の改良について[開発担当:東芝](2016年2月18日)
2016年2月18日

福島第一・2号機の原子炉格納容器(PCV)内部調査については、調査装置の投入口となる貫通部周辺の調査・除染作業などの現場準備が整い次第、遠隔操作ロボット(通称:サソリ型ロボット)を投入して行う計画です。
このたび紹介させていただく同ロボット(改良後)は、IRID組合員である東芝が、モックアップ試験やトレーニングを繰り返す過程で得られた結果を新たに反映したものです。
同ロボットは、これまでも、転倒しても自力で復帰できる機能を設けるなど改良を続けてきましたが、今後も、実際に調査を開始するまでさらなる知見の集積に努めて改善を進めていきます。
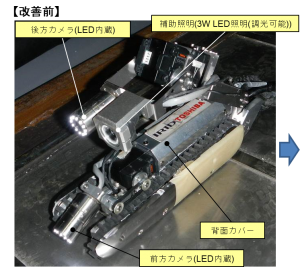

※外観サイズ等は、従来型とほぼ変更なし。
※拡大版はこちら
| No. | 改善内容 | 効果 |
| 1 | 後方カメラ部のフレーム形状変 | 後方カメラと照明部の凹凸をなくし、干渉物等が引っ掛かるリスクを軽減 |
| 2 | 編組チューブの採用 | 複数のケーブルを束ねることで、干渉物等が引っ掛かるリスクを軽減 |
| 3 | 背面カバーの形状変更(カバーの幅を拡張) | 前方カメラケーブルやモータケーブルが、干渉物等に引っ掛かるリスクを軽減 |
| 4 | 0-10Wの範囲で調光可能なLEDを補助照明に採用*1 | 補助照明の変更により、状況に応じてより遠くまで照らすことが可能 |
| *1:運用する照明の消費電力は、PCV内部の環境による。 | ||
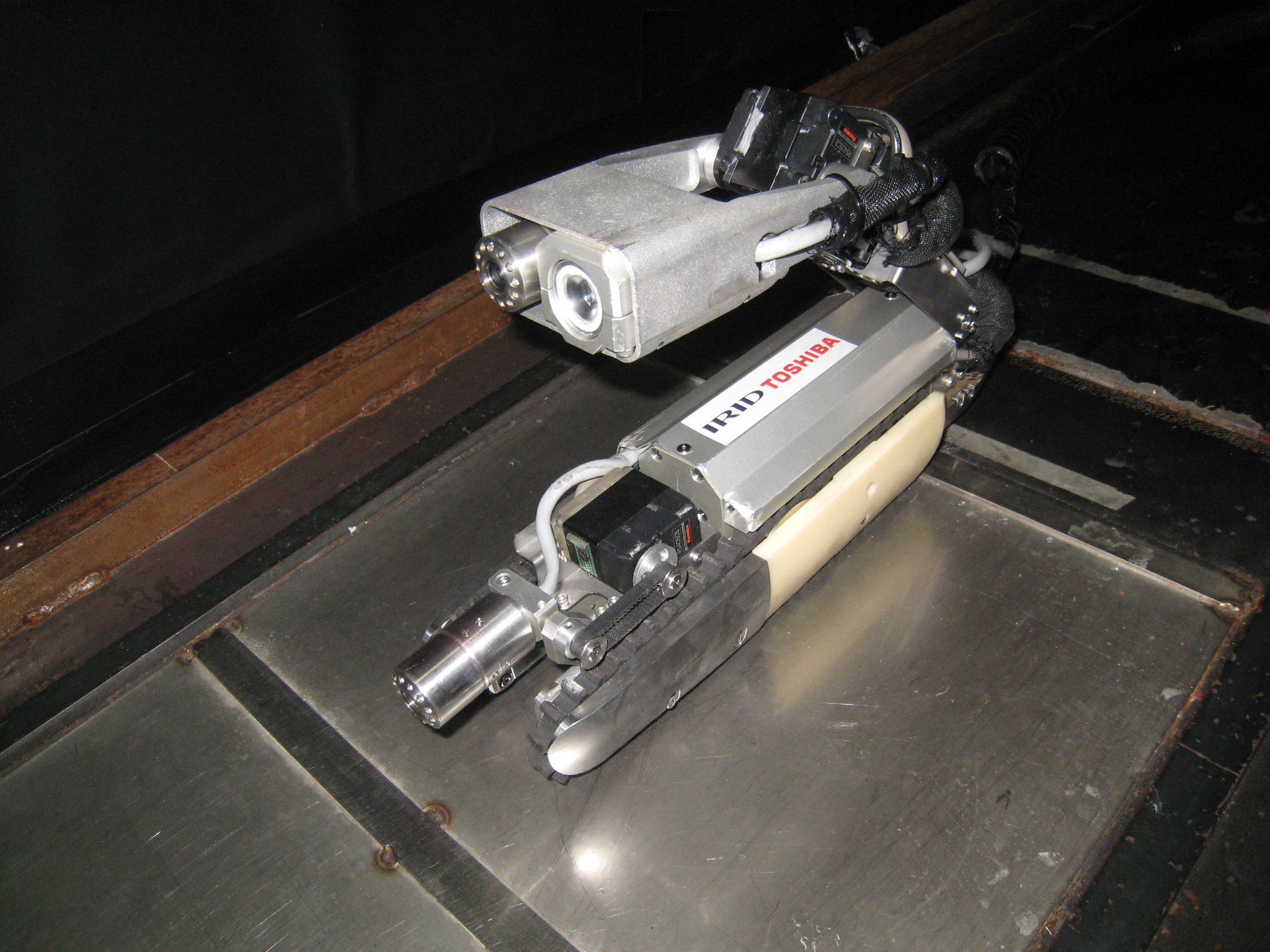
【ロボットの概要】
・移動 クローラタイプ
・調査項目 映像、線量、温度
・サイズ <ガイドパイプ走行時> 約L59cm×W9cm×H9cm
<グレーチング、CRDレール走行時> 約L26cm×W9cm×H22cm
(注)サイズは、現場の状況に応じて形状を変形させるため、代表的な例です。
・重量 約5kg
【ロボットの画像】
 |
 |
| ガイドパイプ走行時 | グレーチング・CRDレール走行時 |
本件に関するお問い合わせはこちら