
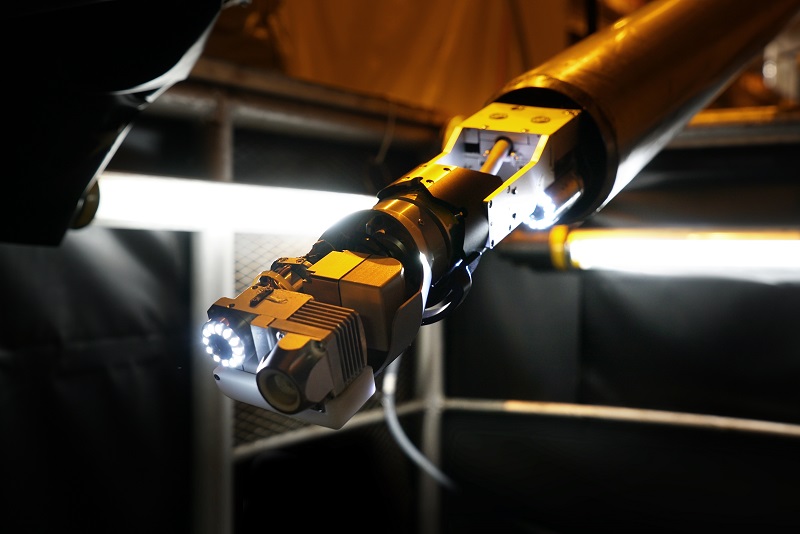
福島第一原子力発電所2号機原子炉格納容器内部詳細調査ならびに試験的燃料デブリ取り出しアクセス・調査装置(ロボットアーム)の三菱重工業株式会社神戸造船所における性能確認試験について[開発担当:三菱重工業株式会社]
2022年3月9日
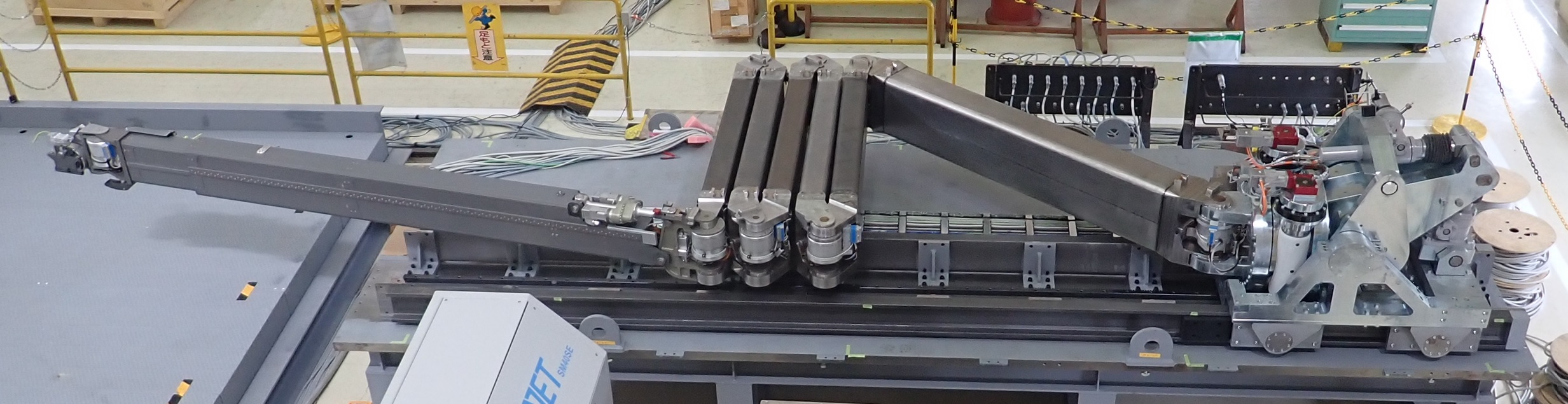
IRIDでは、東京電力ホールディングス福島第一原子力発電所の廃止措置に向け、福島第一原子力発電所2号機原子炉格納容器内部詳細調査アクセス・調査装置ならびに試験的燃料デブリ取り出し装置(ロボットアームやエンクロージャ)の開発を進めてきました。
本装置については、英国から2021年7月に三菱重工業株式会社神戸造船所に移送し、8月下旬から性能確認試験を2022年1月21日まで実施してきました。
今回は、神戸造船所におけるロボットアームの性能確認試験の動画をご紹介いたします。
なお、本装置は経済産業省資源エネルギー庁の廃炉・汚染水対策事業費補助金により得られた成果です。
福島第一原子力発電所1号機原子炉格納容器内部詳細調査用潜水機能付ボート型アクセス・調査装置について[開発担当:日立GEニュークリア・エナジー株式会社]
2019年10月25日
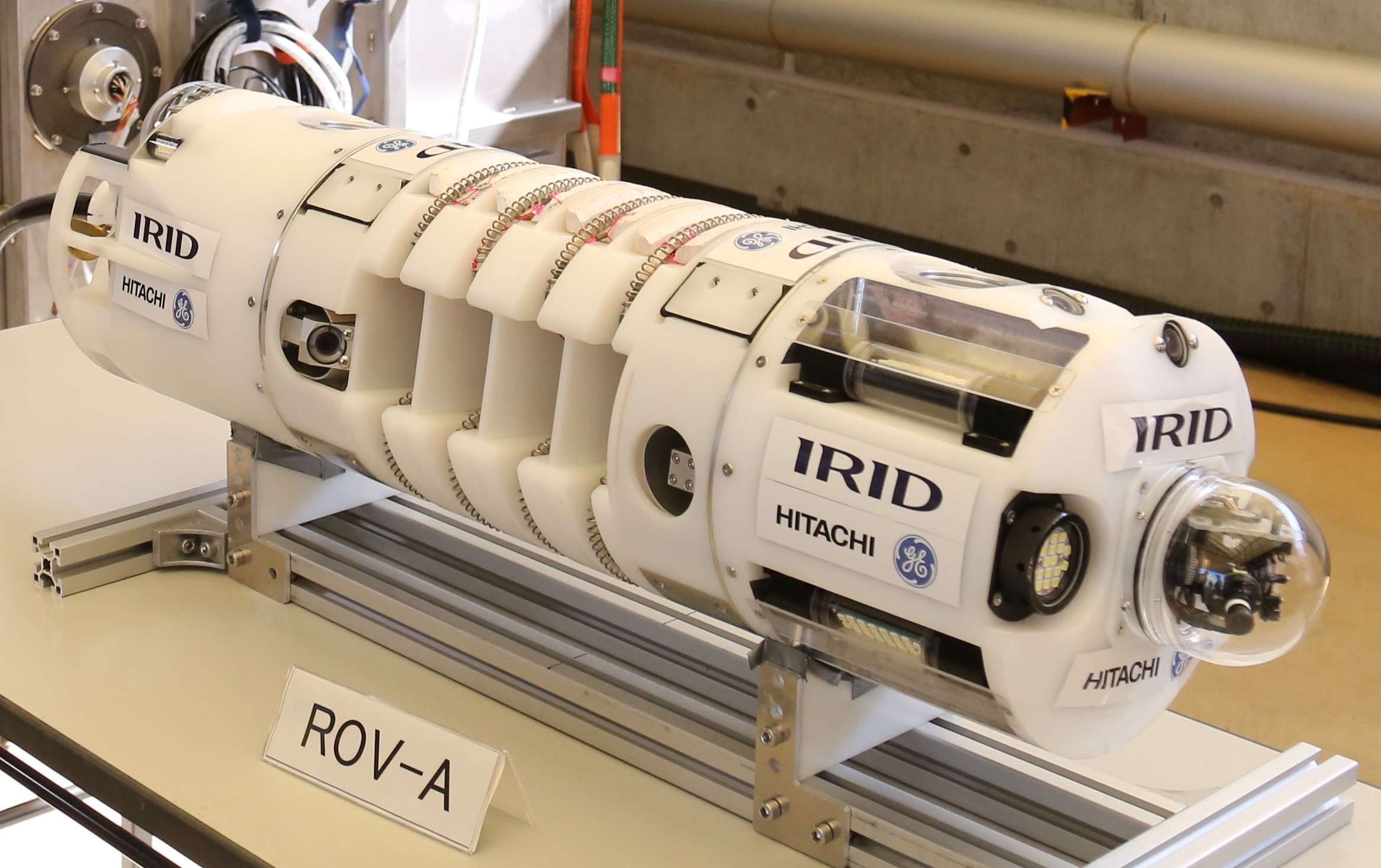
IRIDでは、東京電力ホールディングス福島第一原子力発電所の廃止措置に向け、福島第一原子力発電所1号機原子炉格納容器内部詳細調査用潜水機能付ボート型アクセス・調査装置と小型の詳細目視用ROVを開発してきました。今回、そのラインナップをご紹介いたします。なお、本装置は、経済産業省資源エネルギー庁の「平成29年度補正予算 廃炉・汚染水対策事業費補助金 原子炉格納容器内部詳細調査技術の開発(堆積物対策を前提とした内部詳細調査技術の現場実証)」により得られた成果です。
燃料デブリの気中・横取り出しの要素技術の一つであるロボットアームとアクセスレールの組合せ動作性確認試験について[開発担当:三菱重工業](2019年度上期)
2019年10月10日

福島第一原子力発電所の燃料デブリ取り出しは、小規模のものから始め、燃料デブリの性状や作業経験などから得られる新たな知見を踏まえ、作業を柔軟に見直しつつ、段階的に取り出し規模を拡大していくこととされています。ロボットアームとアクセスレールは、燃料デブリの気中・横取り出しの要素技術の一つとして開発されてきたものであり、燃料デブリ取り出しが始まり、段階的に規模が拡大していく中で使われることを想定したものです。
原子炉格納容器内部詳細調査時の少量サンプル回収装置の開発について[開発担当:三菱重工業](2019年8月)
2019年8月31日

このたび、東京電力ホールディングス福島第一原子力発電所の廃止措置に向け、福島第一原子力発電所2号機の原子炉格納容器内部詳細調査時の少量サンプルを回収するための装置(極細線金ブラシ方式)を開発し、8月1日に開催したIRIDシンポジウム2019にて公開しました。
PCV内部調査/2号機原子炉格納容器内部調査装置の開発について[開発担当:東芝エネルギーシステムズ](2017年12月22日)
2017年12月22日
このたび、東京電力福島第一原子力発電所の廃止措置に向け、福島第一原子力発電所2号機の原子炉格納容器内のペデスタル内部の状況を確認するための調査装置を開発し、12月22日にマスコミ公開を実施しました。
原子炉格納容器漏えい箇所の補修技術の実規模試験 圧力抑制室(suppression chamber, S/C)脚部補強技術の実規模試験について[IRID/日立GEニュークリア・エナジー](2017年7月31日)
2017年7月31日

IRIDでは、福島第一原子力発電所の廃炉に向けて、平成28~29年度の経済産業省によるプロジェクトとして原子炉格納容器の漏えい箇所に対する補修技術の開発を進めておりますが、今回は、圧力抑制室(suppression chamber, S/C)脚部補強技術のモルタル材打設試験を行いました。
原子炉格納容器漏えい箇所の補修技術の実規模試験 圧力抑制室(suppression chamber,S/C)内充填止水技術の実規模試験について[IRID/東芝](2017年6月24日)
2017年6月24日

IRIDでは、福島第一原子力発電所の廃炉に向けて、平成28~29年度の経済産業省によるプロジェクトとして原子炉格納容器の漏えい箇所に対する補修技術の開発を進めておりますが、今回は、S/C充填止水技術のコンクリート打設試験を実施いたしました。
燃料デブリ臨界管理技術の開発/京都大学臨界集合実験装置(KUCA)を利用した「臨界近接監視手法」の開発(2017年6月21日)
2017年6月21日

燃料デブリは、現状は臨界になっていないと推定されています。今後の燃料デブリ取り出し作業時においても、その形状や水量等の状態の変化が予想されますが、臨界の形状を形成する可能性は非常に小さいと考えています。しかし、念には念を入れ、臨界の着実な防止を図るとともに、万が一臨界になった場合でも安全に終息できるように、未臨界監視技術や臨界防止技術の開発を進めています。
PCV内部調査/3号機原子炉格納容器内部を遊泳し調査するロボットの開発について[開発担当:東芝](2017年6月15日)
2017年6月15日

このたび、東京電力福島第一原子力発電所の廃止措置に向け、3号機の原子炉格納容器内部において、冷却水が溜まっている原子炉圧力容器下部のペデスタル内を遊泳し、内部の状況を確認する小型ロボットを開発し、6月15日にマスコミ公開を実施しました。
燃料デブリ取り出し工法の検討「原子炉圧力容器1/1スケールモデル試験」他[開発担当:日立GEニュークリア・エナジー](2017年4月)
2017年4月17日

IRID(開発担当:日立GEニュークリア・エナジー)では、福島第一原子力発電所の廃炉に向けた研究開発の取組のひとつとして、廃炉・汚染水対策事業費補助金・燃料デブリ・炉内構造物取り出しの基盤技術開発事業をおこなっております。
今回は、燃料デブリ取り出し工法のひとつである、燃料デブリ取り出しにおける遠隔作業技術「原子炉圧力容器(以下、RPV)1/1スケールモデル試験の研究開発状況」をご紹介します。